创建部件并添加了一个或多个标准 运动类型 后,用户可以在具有一个或多个自由度的两个零部件之间插入其他(传动、滑动、2D Contact 和受力)运动类型。您必须手动插入这些运动类型;与标准类型不同,其他运动类型无法通过 约束转换 自动创建。这些类别中的所有运动类型将约束由标准运动类型创建的一个或多个自由度。
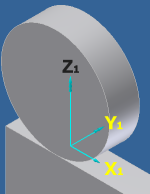 |
传动类型与滑动类型类似,可以封闭 运动回路 ,并且除锥面运动外,可以用于彼此之间存在二维相对运动的零部件。软件在接触点上定位 运动类型坐标系 。运动类型的运动处于由 矢量 Z 1 (法向)和 X 1 (切向)定义的平面中。接触平面由矢量 X 1 和 Y 1 定义。 |
可以仅在彼此之间存在相对运动的零部件之间创建传动类型。因此,包含传动运动类型的两个零部件的机构中必须至少存在一个标准运动类型。传动运动类型将应用永久接触约束。传动类型可以有两种不同的行为,具体取决于在运动类型创建期间所选的选项:
- 传动选项仅能确保齿轮的耦合转动。
- 传动和相切选项可以确保两个齿轮之间的相切以及齿轮的耦合转动。
如果是传动类型、齿轮齿条运动、外齿轮啮合运动和内齿轮啮合运动,则可以访问“效率”参数。值 0.001 到 1.0 表示从输入齿轮到输出齿轮的能量输出。如果传动类型是从设计加速器圆柱齿轮自动创建的,则将自动设置“效率”参数,且无法对该参数进行访问。“效率”参数位于“载荷”部分中的“联接特性参数”选项卡上。
前期步骤
这些联接的构造与滑动联接的构造相似。
- 打开一个部件。
“为运动仿真准备部件”中所包含的提示告诉用户如何对部件建模以进行简单运动 仿真 。
- 在功能区上,单击
“环境”选项卡
 “开始”面板
“运动仿真”
。
“开始”面板
“运动仿真”
。 - 在功能区上,单击
“运动仿真”选项卡
“运动类型”面板
“插入运动类型”
 。
。 - 在“插入运动类型”对话框中,单击运动类型框中的向下箭头或单击“显示运动表”图标
 选择运动类型。
选择运动类型。
其余步骤因要添加的传动联接类型而异。单击下面的运动类型可查看插入该特定运动类型的步骤。
齿轮齿条运动
对于这些运动类型,第二个零部件必须有相对于第一个零部件的平面运动。
- 在运动类型菜单或运动类型表中,选择“齿轮齿条运动”。
- 在“插入运动类型”对话框中,单击“一个约束: 传动”或“两个约束: 传动和相切”。
当圆柱体和平面已正确定位并保证在整个仿真过程中相切时,插入一个约束齿轮齿条运动。圆柱体的 Z 轴与平面之间相距固定距离(圆柱体半径)时,圆柱体和平面就正确定位了。
相切验证标准是严格的。确保零部件几何相切。
插入 2 个约束齿轮齿条运动以强制并保持圆柱体和平面之间相切。相切约束 将生成法向载荷。
默认值为“两个约束: 传动和相切”。
- 在图形窗口中,指定第一个零部件上的平面(坐标系的 X-Z 平面)。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在平面的运动类型坐标系中表示结果。
- 通过选择接触面指定 X-Y 平面。提示: 如果在拾取几何图元时遇到问题,请单击
 ,然后在图形窗口中选择该零部件。该功能可使得在零部件上选择图元更加容易。
,然后在图形窗口中选择该零部件。该功能可使得在零部件上选择图元更加容易。虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
零部件一的运动类型坐标系的原点位于平面链接至圆柱体的点上。
- 如果选择平面作为图元一,则选择 Z 轴来定义平面的法线。如果选择 Z 轴作为图元一,则选择 X 轴来定义平面。
- 通过选择接触面指定 X-Y 平面。
- 指定圆柱体的运动类型坐标系。
- 选择圆柱体。
- 选择运动类型坐标系的原点。
- 如果需要,在“插入运动类型”对话框中单击“切换 X”或“切换 Z”,以将第一个零部件的运动类型坐标系中的 X 轴或 Z 轴的方向反向。
- 单击“确定”。
外齿轮啮合运动
对于这些运动类型,第二个零部件必须有相对于第一个零部件的平面运动。
- 在运动类型菜单或运动类型表中,选择“外齿轮啮合运动”。
- 在“插入运动类型”对话框中,单击“一个约束: 传动”或“两个约束: 传动和相切”。
当两个圆柱体已正确定位并保证在整个仿真过程中相切时,插入一个约束外齿轮啮合运动。两个圆柱体的 Z 轴之间相距固定距离(两个圆柱体的半径之和)时,两个圆柱体就正确定位了。
相切验证标准是严格的。确保零部件几何相切。
插入 2 个约束外齿轮啮合运动以强制并保持两个圆柱体之间相切。相切约束将生成法向载荷。
默认值为“两个约束: 传动和相切”。
- 在图形窗口中,指定包含圆柱体一的零部件的运动类型坐标系。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择第一个圆柱体。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
零部件一的运动类型坐标系的原点位于该零部件链接至第二个零部件的点上。
- 选择 X 轴。
- 选择第一个圆柱体。
- 对于包含第二个圆柱的零部件,请重复步骤 3。
- 如果需要,在“插入运动类型”对话框中单击“切换 X”,以将任一零部件的 X 轴的方向反向。
- 单击“确定”。
如果插入一个约束运动类型并且圆柱体不相切,软件将发出警告,提醒您两轴之间的距离不等于半径之和。
如果插入 2 个约束运动类型并且圆柱体相切,软件将发出警告,提醒用户该机构有一个冗余度。
内齿轮啮合运动
对于这些运动类型,第二个零部件必须有相对于第一个零部件的平面运动。
- 在运动类型菜单或运动类型表中,选择“内齿轮啮合运动”。
- 在“插入运动类型”对话框中,单击“1 个约束: 传动”或“2 个约束: 传动和相切”。
当两个圆柱体已正确定位并保证在整个仿真过程中相切时,插入 1 个约束内齿轮啮合运动。当内圆柱体的 Z 轴与外圆柱体的内 表面 之间相距固定距离(内圆柱体的半径)时,两个圆柱体之间的定位就正确了。
相切验证标准是严格的。确保零部件几何相切。
插入 2 个约束内齿轮啮合运动以强制并保持两个圆柱体之间相切。相切约束将生成法向载荷。
默认为“2 个约束: 传动和相切”。
- 在图形窗口中,指定包含外圆柱体的零部件的运动类型坐标系。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择外圆柱体。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
第一个零部件的运动类型坐标系的原点位于此零部件链接至第二个零部件的点上。
- 选择 X 轴。
- 选择外圆柱体。
- 对于包含内部圆柱的零部件,请重复步骤 3。
- 如果需要,在“插入运动类型”对话框中单击“切换 X”,以将任一零部件的 X 轴的方向反向。
- 单击“确定”。
如果插入 1 个约束运动类型并且圆柱体不相切,软件将发出警告,提醒用户两轴之间的距离不等于半径之和。
如果插入 2 个约束运动类型并且圆柱体已相切(因为运动链的其余部分确保其相切),软件将发出警告,提醒用户该机构有一个冗余度。
凸轮-滚子运动
对于这些运动类型,第二个零部件必须有相对于第一个零部件的平面运动。
- 在运动类型菜单或运动类型表中,选择“凸轮-滚子运动”。
- 在图形窗口中,指定包含曲线的零部件的运动类型坐标系。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择草图上的曲面、边或封闭回路。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择曲线的边。
- 选择草图上的曲面、边或封闭回路。
- 在图形窗口中,指定包含圆柱体的零部件的运动类型坐标系。
- 选择圆柱体。
- 选择运动类型坐标系的原点。
- 单击“确定”。
带传动
对于这些运动类型,两个零部件的旋转轴必须平行,也就是说,运动类型要在处于同一平面内的两个皮带轮之间工作。带传动仅在两个圆柱体中心之间的距离固定时才能起作用。
- 在运动类型菜单或运动类型表中,选择“带传动”。
- 在“插入运动类型”对话框中,单击“直皮带”或“相交皮带”。
默认值为“直皮带”。
- 在图形窗口中,指定包含圆柱体一的零部件的运动类型坐标系。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择圆柱体一。
圆柱体的轴必须是该联接坐标系的 Z 轴。
提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
第一个零部件的运动类型坐标系的原点位于此零部件链接至第二个零部件的点上。
- 选择 X 轴。
- 选择圆柱体一。
- 对包含圆柱体二的零部件重复步骤 3。
- 如果需要,在“插入运动类型”对话框中单击“切换 X”,以将 X 轴的方向反向。
- 单击“确定”。
平面锥齿轮啮合运动
对于该运动类型,圆锥体必须与平面相切。在仿真过程中,使用其他运动类型以保持相切。
- 在运动类型菜单或运动类型表中,选择“平面锥齿轮啮合运动”。
- 在图形窗口中,选择平面。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
软件将在平面的运动类型坐标系中表示结果。
- 选择圆锥体。
软件将自动放置两个运动类型坐标系。
- 单击“确定”。
普通锥齿轮外啮合运动
对于这些运动类型,第二个圆锥体必须与第一个圆锥体相切。在仿真过程中,使用其他运动类型以保持相切。
- 在运动类型菜单或运动类型表中,选择“普通锥齿轮外啮合运动”。
- 在图形窗口中,选择第一个圆锥体。
如果选定的零部件不包含圆锥体,运动仿真会生成一个圆锥体,其底和半径 (R1) 将作为第一个圆锥体的底和半径。顶点位于两个零部件的坐标系 Y 轴的交点处。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择 Y 轴或一个圆锥体。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
- 选择 Y 轴或一个圆锥体。
- 选择包含第二个圆锥体的零部件的运动类型坐标系的 Y 轴。
- 如果需要,在“插入运动类型”对话框中单击“切换 Y”,以将 Y 轴的方向反向。
- 单击“确定”。
普通锥齿轮内啮合运动
对于这些运动类型,内圆锥体必须与外圆锥体相切。在仿真过程中,使用其他运动类型以保持相切。
- 在运动类型菜单或运动类型表中,选择“普通锥齿轮内啮合运动”。
- 在图形窗口中,指定包含外圆锥体的零部件的运动类型坐标系。
如果选定的零部件不包含圆锥体,运动仿真会生成一个圆锥体,其底和半径 (R1) 将作为第一个圆锥体的底和半径。顶点位于零部件一和零部件二的坐标系 Y 轴的交点处。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择 Y 轴。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
- 选择 Y 轴。
- 选择内圆锥体的运动类型坐标系的 Y 轴。
- 如果需要,在“插入运动类型”对话框中单击“切换 Y”,以将 Y 轴的方向反向。
- 单击“确定”。
螺旋运动
与其他传动类型一样,螺旋运动在彼此已有相对自由度的零部件之间起作用。螺旋运动可以耦合转动自由度和平动自由度。默认情况下,在运动类型创建过程中,软件会在创建螺旋运动之前创建柱面运动,以提供两个零部件之间的两个自由度。
- 在运动类型菜单或运动类型表中,选择“螺旋运动”。
- 如果希望软件首先创建两个零部件之间的柱面运动类型,则在“插入运动类型”对话框中单击“创建柱面运动”。
两个零部件之间必须有柱面运动,才能插入螺旋运动。
- 在图形窗口中,指定第一个零部件的运动类型坐标系。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择 Z 轴,即平动自由度和转动自由度的轴。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该操作可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
第一个零部件的运动类型坐标系的原点位于该零部件与第二个零部件相链接的点上。
- 选择 X 轴。
- 选择 Z 轴,即平动自由度和转动自由度的轴。
- 对于第二个零部件,请重复步骤 3。
- 如果需要,在“插入运动类型”对话框中单击“切换 Z”将 Z 轴的方向反向,或单击“切换 X”将 X 轴的方向反向。
- 输入螺杆的节距。
- 单击“确定”。
蜗轮蜗杆啮合运动
与其他传动类型一样,蜗轮蜗杆啮合运动在彼此已有相对自由度的零部件之间起作用。蜗轮蜗杆啮合运动可以耦合互相垂直的两个转动自由度。
- 在运动类型菜单或运动类型表中,选择“蜗轮蜗杆啮合运动”。
- 在图形窗口中,指定包含蜗轮的零部件的运动类型坐标系。
零部件的运动类型坐标系可能与零部件坐标系不同。
软件将在第一个零部件的运动类型坐标系中表示结果。
- 选择 Z 轴。提示: 如果在拾取几何图元时遇到问题,请单击,然后在图形窗口中选择零部件。该功能可使得在零部件上选择图元更加容易。
虽然并不总是需要选择其他几何图元来指定运动类型坐标系,但最好尽可能精确地指定运动类型坐标系。
- 选择运动类型坐标系的原点。
第一个零部件的运动类型坐标系的原点位于蜗轮链接至螺杆的点上。
- 选择 X 轴。
- 选择 Z 轴。
- 指定包含螺杆的零部件的运动类型坐标系。
- 选择 Z 轴。
- 选择运动类型坐标系的原点。
- 选择 X 轴。
- 如果需要,在“插入运动类型”对话框中单击“切换 Z”将 Z 轴的方向反向,或单击“切换 X”将 X 轴的方向反向。
- 输入螺杆的节距。
- 单击“确定”。
 演示如何创建传动柱面运动
演示如何创建传动柱面运动