若要定义接触,我们需要做两件事。首先,使软件能自动监测到那些满足在“应力分析设置”中找到的默认条件的接触。然后,手动定义其他接触。
由成对的面组成的手动接触在初始默认接触公差过小的情况下使用。
默认接触类型已绑定,但是,您还可以指定各种接触类型,例如“分离”、“滑动/无分离”等。
在该示例中,我们要添加手动绑定的接触以模仿叉元素的相对位移。
- 在“接触”面板中,单击“手动接触”。
由于您尚未运行自动检测接触,因此您将收到以下消息:在能够添加手动接触之前将运行自动接触。
- 单击“确定”。
自动接触将检测范围位于默认公差之内的接触。合格的接触将填充“接触”文件夹。自动接触建立后,将显示“手动接触”对话框。
若要查看自动创建的接触,请在浏览器中展开“接触”文件夹。
- 当“手动接触”对话框显示时,请选择 Fork-Tube.ipt 的外表面和 Fork-Slider.ipt 零部件的主内表面。接触类型应该为“粘合”。单击“应用”。
- 检查 Fork-Tube_MIR.ipt 和 Fork-Slider_MIR.ipt 零部件的主要内表面之间是否有接触。接触类型应该为“粘合”。如果不是,则使用从步骤 3 开始的方法创建与这些零部件的接触。
- 还必须再添加一个手动接触,以代表 Fork-Slider 粘合的零部件。选择 Fork-Slider 的两个相对面,如下图所示。可用视图导航命令以定向视图。
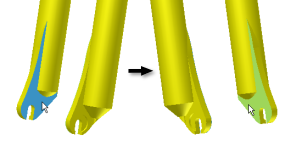
- 请确保接触类型为“粘合”。
- 单击“确定”。将在两个面之间指定粘合接触,如图所示。
接下来,我们指定网格选项。