在进一步学习教程之前,最好了解部件装配和运动仿真环境之间的区别。
尽管运动仿真和部件环境都与创建机构有关,但是这两者之间存在一些关键的差别。基本差别与自由度和它们的管理方式有关。
在部件环境中,未约束和未固定零部件具有六个自由度。
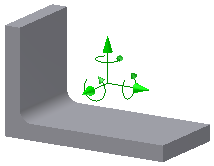
可以添加约束以限制自由度。例如,在该零件和其某一标准平面之间添加一个表面齐平约束会删除三个自由度。
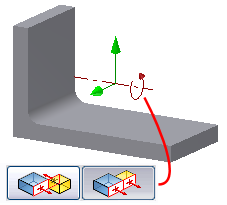
在运动仿真中,未约束和未固定零部件具有零个自由度并且不会在仿真中移动。添加运动类型的操作将创建自由度。当进入运动仿真时,具有配合约束的零部件将自动接收这些运动类型。
无论使用运动仿真还是装配环境,目的都在于创建功能机械装置。运动仿真将运动、各种载荷的实际影响添加到该功能机械装置以创建真正的运动链。