输出图示器是检查仿真的各种结果的方法。以下是您在运行仿真后可进行的某些操作的列表:
- 显示内部力或外部力的矢量
- 更改参考坐标系以在各种坐标系中查看结果
- 显示曲线结果
- 保存仿真结果以供以后查看和比较
- 根据时间或其他标准显示结果
- 显示轨迹以可视化零部件点的轨迹。
显示轨迹
- 运行仿真后,在离开运行环境之前,单击“输出图示器”命令。
“输出图示器”窗口分成不同的区域:浏览器、图形和时间点。在横跨窗口顶部的工具栏中有输出图示器特定命令。该窗口可调整大小,因此对其进行调整以满足您的需求。
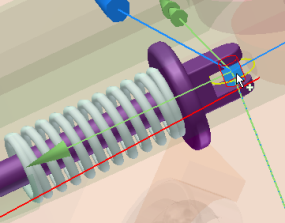
- 单击“添加轨迹”。将显示对话框,并且原点选择器已激活且等待输入。选择锯刀片末端的点。

- 在对话框中,选中“输出轨迹值”选项。

- 指定沿锯刀片的另外两个轨迹点。导出轨迹。
将轨迹设定为参考
- 在“输出图示器”浏览器中,展开“轨迹”。
- 展开“轨迹:1”,然后展开“位置”。
- 在“P[X]”上单击鼠标右键,然后单击“设为参考”。
- 使用“输出图示器”中的“保存”命令,保存仿真。
- 输入名称:Reciprocating Saw cam1.iaa。单击“确定”。
- 关闭“输出图示器”。
- 在仿真播放器中,单击“构造模式”。
修改凸轮零部件
- 在浏览器中的“移动组”下,展开“凸轮曲轴”部件。
- 在 Cam lobe.ipt 零部件上单击鼠标右键,然后单击“编辑”。
- 编辑草图以进行凸角拉伸。
- 双击尺寸 5.08。将该值更改为 1.0。
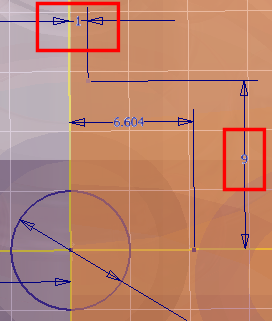
- 双击尺寸 7.62。将该值更改为 9。
- 在功能条的靠右侧,单击“完成草图”。
- 在功能条的同一区域,单击“返回”。
- 在仿真播放器中,单击“运行”。
- 启动输出图示器。
- 在“输出图示器”工具栏中,单击“导入仿真”。
- 选择文件:Reciprocating Saw cam1.iaa。仿真数据将填充“输出图示器”浏览器。
- 展开 Reciprocating Saw cam1.iaa 节点,然后展开“轨迹”。
- 展开“轨迹:1”,然后展开“位置”。
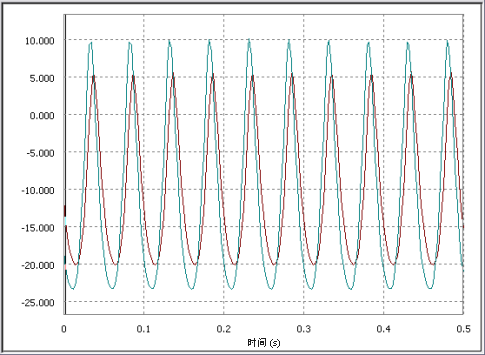
- 单击“P[Z]”以将其显示在其他仿真轨迹的上方。可以用此方式来比较仿真结果。
导出到 FEA
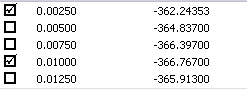
- 在“输出图示器”中的“时间点”区域中,在您要在应力分析环境中分析的若干时间点旁边,勾上复选标记。
- 在“输出图示器”工具栏中,单击“导出到 FEA”将显示“导出到 FEA”对话框,并激活零件选择器。
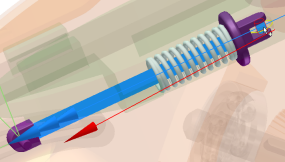
- 在图形窗口中,单击“推杆:1”。
- 单击“确定”。
选择面
- 在“FEA 承载面选择”对话框中“选定的零件”区域中,单击“推杆:1”。
- 在要完成的运动类型区域中,单击“平移:3 (导向:1,推杆:1)”。
- 在图形窗口中的推杆零件上,选择滑入导向零部件中的孔内的面。
- 在对话框中,单击“Revolution:5 (Follower Roller:1, Follower:1)”
- 在图形窗口中的推杆上,选择推杆滚柱零部件经过的圆柱面。
- 在对话框上,单击“弹簧/阻尼器/千斤顶::7 (导向:1,推杆:1)”。
- 在图形窗口中的推杆上,选择弹簧运动类型接触推杆的面。
- 在此对话框中,单击“确定”。
选择时间步长
- 运行仿真。
- 在“输出图示器”的时间点窗格中,单击“0.095 s”、“0.2375 s”和“0.3925 s”时间点。
- 关闭“输出图示器”。
- 在功能区栏中,单击“完成运动仿真”。
将运动载荷导入应力分析
- 在功能区栏上,单击“环境”选项卡
 “应力分析”。
“应力分析”。 - 在“应力分析”选项卡上,单击“创建分析”。
- 在对话框中的“仿真”选项卡的“静态分析”区域中,选中“运动载荷分析”选项。
“零件”和“时间点”列表将启用。“零件”列表包含已导出到 FEA 的那些零件。您可以导出多个零部件并为每个零部件创建不同的仿真。
“时间点”列表包含您选择要导出的时间点。
- 从“时间点”列表中,选择时间点“0.2375”并单击“确定”。
在图形窗口中,推杆零部件是唯一可以用来仿真的零部件,其他所有零部件都已排除。

- 在浏览器中展开“载荷”节点。在零部件操作中将涉及很多力。这些力也显示在图形面域中。您可以抑制任何不希望在仿真中激活的力。若要查看任意单个力的作用,请抑制其他力。
- 在“求解”面板中单击“分析”。分析可能需要花费一些时间来求解。当分析完成后,可能会显示 Mises 等效应力结果。
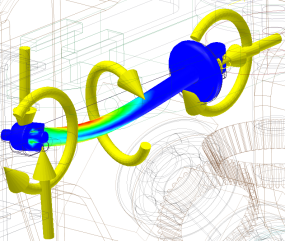
- 展开“结果”节点并双击您要查看的结果。
- 单击“仿真”选项卡,然后单击“运动仿真”。