建立組合並加入一個或多個標準 接合 後,您可以在具有一個或多個自由度的兩個元件之間插入其他接合 (例如滾動接合、滑動接合、2D 接觸接合和力接合)。您必須手動插入這些接頭;與標準接頭不同,不能透過 約束轉換 自動建立其他接頭。這些品類中的所有接頭可約束一個或多個透過標準接頭建立的自由度。
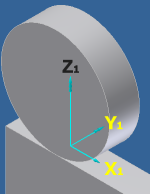 |
滾動接頭與滑動接頭類似,可以封閉 運動迴路 ,並且適用於彼此間具有相對 2D 運動的元件 (圓錐形接頭除外)。軟體在接觸點定位 接頭座標系統 。接頭運動位於由 向量 Z 1 (正垂) 和 X 1 (相切) 定義的平面上。接觸平面由向量 X 1 和 Y 1 定義。 |
只能在彼此間具有相對運動的元件之間建立滾動接頭。因此,機構中必須至少存在一個標準接合,其包含滾動接合的兩個元件。滾動接合套用永久接觸約束。滾動接頭可能有兩種不同的行為,具體取決於建立接頭期間選取的選項:
- 滾動選項僅可確保齒輪的耦合旋轉。
- 滾動和相切選項可確保兩個齒輪之間相切,並可確保齒輪的耦合旋轉。
滾動接頭 (平面上的圓柱、圓柱上的圓柱和圓柱中的圓柱) 提供對「效率」參數的存取。介於 0.001 和 1.0 之間的值表示從輸入齒輪到輸出齒輪的能量輸出。如果已從機械便覽魔法師正齒輪自動建立滾動接頭,則會自動設定「效率」參數,並且停用對此參數的存取。「效率」參數位於「負載」部分中「接頭性質」的「參數」頁籤上。
預備步驟
這些接頭的建構與滑動接頭的建構類似。
- 開啟組合。
〈為動力學 模擬 準備組合〉中包括的秘訣說明了如何對組合塑型,以輕鬆進行動力學模擬。
- 在功能區中,按一下
「環境」頁籤
 「開始」面板
「動力學模擬」
。
「開始」面板
「動力學模擬」
。 - 在功能區中,按一下
「動力學模擬」頁籤
「接頭」面板
「插入接頭」
 。
。 - 在「插入接頭」對話方塊中,按一下接頭類型方塊中的向下箭頭,或按一下「顯示接頭表格」圖示
 ,以選取接頭類型。
,以選取接頭類型。
剩餘的步驟視您加入的滾動接頭類型而有所不同。按一下下面的接頭類型,以查看插入該特定接頭類型的步驟。
滾動: 平面上的圓柱
對於這些接頭,第二個元件必須相對第一個元件具有平面運動。
- 在接頭類型功能表或接頭表格中,選取「滾動: 平面上的圓柱」。
- 在「插入接頭」對話方塊中,按一下「一個約束: 滾動」或「兩個約束: 滾動和相切」。
在已正確定位圓柱和平面,並且整個模擬期間可保證相切後,插入具有一個約束的平面上的圓柱滾動接頭。當圓柱的 Z 軸線與平面之間相距固定距離 (圓柱半徑) 時,即已正確定位圓柱與平面。
相切檢驗準則是嚴格的。請確保元件的幾何圖形相切。
插入具有兩個約束的平面上的圓柱接頭,以強制並保持圓柱與平面相切。相切約束 可產生法向負載。
預設為「兩個約束: 滾動和相切」。
- 在圖形視窗中,指定第一個元件上的平面 (座標系統的 X-Z 平面)。
元件的接頭座標系統可以與元件座標系統不同。
軟體在平面的接頭座標系統中表示結果。
- 透過選取接觸平面來指定 X-Y 平面。提示: 如果您點選幾何圖元有困難,請按一下
 ,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
第一個元件之接頭座標系統的原點是平面與圓柱的連結點。
- 如果您選取平面做為第一個圖元,請選取 Z 軸線來定義平面的法線。如果您選取 Z 軸線做為圖元一,請選取 X 軸線來定義平面。
- 透過選取接觸平面來指定 X-Y 平面。
- 指定圓柱的接頭座標系統。
- 選取圓柱。
- 選取接頭座標系統的原點。
- 如有必要,請在「插入接頭」對話方塊中按一下「切換 X」或「切換 Z」,以翻轉第一個元件之接頭座標系統的 X 軸線或 Z 軸線方向。
- 按一下「確定」。
滾動: 圓柱上的圓柱
對於這些接頭,第二個元件必須相對第一個元件具有平面運動。
- 在接頭類型功能表或接頭表格中,選取「滾動: 圓柱上的圓柱」。
- 在「插入接頭」對話方塊中,按一下「一個約束: 滾動」或「兩個約束: 滾動和相切」。
在已正確定位兩個圓柱,並且整個模擬期間可保證相切後,插入具有一個約束的圓柱上的圓柱滾動接頭。當兩個圓柱的 Z 軸線之間相距固定距離 (兩個圓柱的半徑之和) 時,即已正確定位兩個圓柱。
相切檢驗準則是嚴格的。請確保元件的幾何圖形相切。
插入具有兩個約束的圓柱上的圓柱接頭,以強制並保持兩個圓柱相切。相切約束可產生法向負載。
預設為「兩個約束: 滾動和相切」。
- 在圖形視窗中,指定包含第一個圓柱之元件的接頭座標系統。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取第一個圓柱。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
第一個元件之接頭座標系統的原點是此元件與第二個元件的連結點。
- 選取 X 軸線。
- 選取第一個圓柱。
- 針對包含第二個圓柱的元件重複步驟 3。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 X」以翻轉任一元件的 X 軸線方向。
- 按一下「確定」。
如果您插入具有一個約束的接頭並且圓柱不相切,則軟體會警告您兩軸線之間的距離不等於半徑之和。
如果您插入具有 2 個約束的接頭並且圓柱相切,則軟體會警告您機構有一個贅力度。
滾動: 圓柱中的圓柱
對於這些接頭,第二個元件必須相對第一個元件具有平面運動。
- 在接頭類型功能表或接頭表格中,選取「滾動: 圓柱中的圓柱」。
- 在「插入接頭」對話方塊中,按一下「一個約束: 滾動」或「兩個約束: 滾動和相切」。
在已正確定位兩個圓柱,並且整個模擬期間可保證相切後,於圓柱接頭中插入具有 1 個約束的滾動圓柱。當內部圓柱的 Z 軸線與外部圓柱的內部 表面 之間相距固定距離 (內部圓柱的半徑) 時,即已正確定位兩個圓柱。
相切檢驗準則是嚴格的。請確保元件的幾何圖形相切。
插入具有兩個約束的圓柱中的圓柱接頭,以強制並保持兩個圓柱相切。相切約束可產生法向負載。
預設為「兩個約束: 滾動和相切」。
- 在圖形視窗中,指定包含外部圓柱的元件的接頭座標系統。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取外部圓柱。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
第一個元件之接頭座標系統的原點是此元件與第二個元件的連結點。
- 選取 X 軸線。
- 選取外部圓柱。
- 針對包含內部圓柱的元件重複步驟 3。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 X」以翻轉任一元件的 X 軸線方向。
- 按一下「確定」。
如果您插入具有 1 個約束的接頭並且圓柱不相切,則軟體會警告您兩個軸之間的距離不等於半徑之和。
如果您插入具有 2 個約束的接頭並且圓柱已相切 (因為剩餘運動鏈可確保其相切),則軟體會警告您機構有一個贅力度。
滾動: 圓柱曲線
對於這些接頭,第二個元件必須相對第一個元件具有平面運動。
- 在接頭類型功能表或接頭表格中,選取「滾動: 圓柱曲線」。
- 在圖形視窗中,指定包含曲線的元件的接頭座標系統。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取草圖中的曲面、邊或封閉迴路。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取曲線的邊。
- 選取草圖中的曲面、邊或封閉迴路。
- 在圖形視窗中,指定包含圓柱之元件的接頭座標系統。
- 選取圓柱。
- 選取接頭座標系統的原點。
- 按一下「確定」。
皮帶
對於這些接頭,兩個元件的旋轉軸線必須平行,換而言之,接頭用於位於同一平面中的兩個皮帶輪之間。僅當兩個圓柱中心之間的距離固定時,皮帶接頭才能起作用。
- 在接頭類型功能表或接頭表格中,選取「皮帶」。
- 在「插入接頭」對話方塊中,按一下「直皮帶」或「交叉皮帶」。
預設為「直皮帶」。
- 在圖形視窗中,指定包含第一個圓柱之元件的接頭座標系統。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取第一個圓柱。
圓柱的軸線必須為此接頭座標系統的 Z 軸線。
提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
第一個元件之接頭座標系統的原點是此元件與第二個元件的連結點。
- 選取 X 軸線。
- 選取第一個圓柱。
- 針對包含第二個圓柱的元件重複步驟 3。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 X」以翻轉 X 軸線的方向。
- 按一下「確定」。
滾動: 平面上的圓錐
對於此接頭,圓錐必須與平面相切。在模擬期間,使用其他接頭來維持相切。
- 在接頭類型功能表或接頭表格中,選取「滾動: 平面上的的圓錐」。
- 在圖形視窗中,選取平面。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
軟體在平面的接頭座標系統中表示結果。
- 選取圓錐。
軟體會自動放置兩個接頭座標系統。
- 按一下「確定」。
滾動: 圓錐上的圓錐
對於這些接頭,第二個圓錐必須與第一個圓錐相切。在模擬期間,使用其他接頭來維持相切。
- 在接頭類型功能表或接頭表格中,選取「滾動: 圓錐上的圓錐」。
- 在圖形視窗中,選取第一個圓錐。
如果所選的元件不包含圓錐,則動力學模擬將產生一個圓錐,其基底和半徑 (R1) 可由您選取。頂點為兩個元件之座標系統 Y 軸線的相交點。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取 Y 軸線或圓錐。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
- 選取 Y 軸線或圓錐。
- 選取包含第二個圓錐之元件的接頭座標系統 Y 軸線。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 Y」以翻轉 Y 軸線的方向。
- 按一下「確定」。
滾動: 圓錐中的圓錐
對於這些接頭,內部圓錐必須與外部圓錐相切。在模擬期間,使用其他接頭來維持相切。
- 在接頭類型功能表或接頭表格中,選取「滾動: 圓錐中的圓錐」。
- 在圖形視窗中,指定包含外部圓錐之元件的接頭座標系統。
如果所選的元件不包含圓錐,則動力學模擬將產生一個圓錐,其基底和半徑 (R1) 可由您選取。頂點為第一個元件和第二個元件之座標系統 Y 軸線的相交點。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取 Y 軸線。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
- 選取 Y 軸線。
- 選取內部圓錐的接頭座標系統 Y 軸線。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 Y」以翻轉 Y 軸線的方向。
- 按一下「確定」。
螺桿
與其他滾動接頭類似,螺桿接頭用於彼此間已具有相對自由度的元件之間。螺桿接頭耦合旋轉自由度與平移自由度。依預設,在建立接頭期間,軟體會建立圓柱接頭,以在建立螺桿接頭之前提供兩個元件之間的兩個自由度。
- 在接頭類型功能表或接頭表格中,選取「螺桿」。
- 如果您希望軟體首先在兩個元件之間建立圓柱接頭,請在「插入接頭」對話方塊中按一下「建立圓柱接頭」。
兩個元件之間必須具有圓柱接頭,然後您才能夠插入螺桿接頭。
- 在圖形視窗中,指定第一個元件的接頭座標系統。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取 Z 軸線,即平移自由度與旋轉自由度的軸線。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
第一個元件之接頭座標系統的原點是該元件與第二個元件的連結點。
- 選取 X 軸線。
- 選取 Z 軸線,即平移自由度與旋轉自由度的軸線。
- 針對第二個元件重複步驟 3。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 Z」以翻轉 Z 軸線的方向,或按一下「切換 X」以翻轉 X 軸線的方向。
- 輸入螺桿的節距。
- 按一下「確定」。
蝸輪
與其他滾動接頭類似,蝸輪接頭用於彼此間已具有相對自由度的元件之間。蝸輪接頭耦合兩個互垂的旋轉自由度。
- 在接頭類型功能表或接頭表格中,選取「蝸輪」。
- 在圖形視窗中,指定包含齒輪之元件的接頭座標系統。
元件的接頭座標系統可以與元件座標系統不同。
軟體在第一個元件的接頭座標系統中表示結果。
- 選取 Z 軸線。提示: 如果您點選幾何圖元有困難,請按一下,然後在圖形視窗中選取元件。此功能可讓您更輕鬆地選取元件中的圖元。
雖然您並不是永遠需要選取其他幾何圖元以指定接頭座標系統,但儘可能精確地指定接頭座標系統是一種很好的做法。
- 選取接頭座標系統的原點。
第一個元件之接頭座標系統的原點是齒輪與螺桿的連結點。
- 選取 X 軸線。
- 選取 Z 軸線。
- 指定包含螺桿之元件的接頭座標系統。
- 選取 Z 軸線。
- 選取接頭座標系統的原點。
- 選取 X 軸線。
- 如有必要,在「插入接頭」對話方塊中,按一下「切換 Z」以翻轉 Z 軸線的方向,或按一下「切換 X」以翻轉 X 軸線的方向。
- 輸入螺桿的節距。
- 按一下「確定」。
 展示如何建立滾動圓柱接合
展示如何建立滾動圓柱接合