Après avoir créé un ensemble et ajouté une ou plusieurs liaisons standard, vous pouvez insérer d'autres liaisons (roulantes, coulissantes, de contact 2D et de force) entre les deux composants liés par un ou plusieurs degrés de liberté. Il est impératif d'insérer manuellement ces liaisons ; contrairement aux liaisons standard, les autres types de liaison ne peuvent être automatiquement créés par conversion des contraintes . Toutes les liaisons de ces catégories contraignent un ou plusieurs des degrés de liberté créés par des liaisons standard.
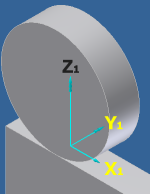 |
Les liaisons roulantes, tout comme les liaisons coulissantes, peuvent fermer des boucles cinématiques et, à l'exception des liaisons coniques, conviennent aux composants qui se déplacent l'un par rapport à l'autre selon un mouvement 2D. Le logiciel positionne les systèmes de coordonnées de liaison au point de contact. Le mouvement de la liaison s'effectue dans le plan défini par les vecteurs Z 1 ( normale) et X 1 (tangente). Le plan de contact est défini par les vecteurs X 1 et Y 1 . |
Les liaisons roulantes ne peuvent être créées qu'entre des composants qui se déplacent l'un par rapport à l'autre. Par conséquent, le mécanisme qui contient les deux composants d'une liaison roulante doit comprendre au moins une liaison standard. Les liaisons roulantes appliquent une contrainte de contact non démontable. Ces liaisons peuvent se comporter de deux façons différentes selon l'option que vous choisissez durant leur création :
- L'option roulement garantit uniquement la rotation couplée des engrenages.
- L'option roulement et tangente garantit la tangence entre les deux engrenages, ainsi que leur rotation couplée.
Les liaisons roulantes Cylindre sur plan, Cylindre sur cylindre et Cylindre dans cylindre permettent d'accéder au paramètre Rendement. Des valeurs de 0.001 à 1.0 représentent l'énergie produite entre l'engrenage d'entrée et l'engrenage de sortie. Si la liaison roulante est créée automatiquement à partir d'un engrenage cyclique Design Accelerator, le paramètre Rendement est automatiquement défini et inaccessible. Le paramètre Rendement se trouve dans l'onglet Paramètres des propriétés de la liaison, dans la section Charges.
Etapes préalables
La construction de ces liaisons est similaire à celle des liaisons coulissantes.
- Ouvrez un ensemble.
Les conseils fournis sous la rubrique Préparer des ensembles pour la simulation dynamique vous indiquent comment modéliser un ensemble pour faciliter la simulation dynamique.
- Dans le ruban, cliquez sur l'onglet Environnement
 le groupe de fonctions Début Simulation dynamique. .
le groupe de fonctions Début Simulation dynamique. . - Dans le ruban, cliquez sur l'onglet Simulation dynamique le groupe de fonctions Liaison Insérer une liaison
 .
. - Dans la boîte de dialogue Insérer une liaison, sélectionnez un type de liaison en cliquant sur la flèche vers le bas de la zone correspondante ou en cliquant sur le bouton Afficher la table des liaisons
 .
.
Les autres étapes changent selon le type de liaison roulante à ajouter. Cliquez sur le type de liaison ci-après pour voir la procédure d'insertion correspondante.
Roulement : cylindre sur plan
Pour ces liaisons, le deuxième composant doit se déplacer suivant un mouvement plan par rapport au premier composant.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cylindre sur plan.
- Dans la boîte de dialogue Insérer une liaison, cliquez sur contrainte : roulement ou sur contraintes : roulement et tangente.
Insérez des liaisons roulantes cylindre/plan à 1 contrainte lorsque le cylindre et le plan sont déjà correctement placés et que la tangence est garantie pendant toute la simulation. Le cylindre et le plan sont correctement placés si l'axe Z du cylindre est à une distance fixe (égale au rayon du cylindre) par rapport au plan.
Les critères de vérification de la tangence sont stricts. Assurez-vous que les composants sont géométriquement tangents.
Insérez des liaisons roulantes cylindre/plan à 2 contraintes pour imposer et conserver la tangence entre le cylindre et le plan. La contrainte de tangence génère une charge normale.
L'option sélectionnée par défaut est 2 contraintes : roulement et tangente.
- Dans la fenêtre graphique, indiquez le plan sur le premier composant (le plan X-Z du système de coordonnées).
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du plan.
- Sélectionnez le plan X-Y en sélectionnant le plan de contact.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur
 , puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
L'origine du système de coordonnées de liaison du premier composant est le point où le plan est lié au cylindre.
- Si vous sélectionnez le plan en tant que première entité, sélectionnez l'axe Z pour définir la normale au plan. Si vous sélectionnez l'axe Z en tant que première entité, sélectionnez l'axe X pour définir le plan.
- Sélectionnez le plan X-Y en sélectionnant le plan de contact.
- Spécifiez le système de coordonnées de liaison du cylindre.
- Sélectionnez le cylindre.
- Sélectionnez l'origine du système de coordonnées de liaison.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser X/Z pour inverser la direction de l'axe X ou de l'axe Z du système de coordonnées de liaison pour le premier composant.
- Cliquez sur OK.
Roulement : cylindre sur cylindre
Pour ces liaisons, le deuxième composant doit se déplacer suivant un mouvement plan par rapport au premier composant.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cylindre sur cylindre.
- Dans la boîte de dialogue Insérer une liaison, cliquez sur 1 contrainte : roulement ou sur 2 contraintes : roulement et tangente.
Insérez des liaisons roulantes cylindre/cylindre à 1 contrainte lorsque les deux cylindres sont déjà correctement placés et que la tangence est garantie pendant toute la simulation. Les deux cylindres sont correctement placés si les axes Z des deux cylindres sont séparés d'une distance fixe (égale à la somme des rayons des deux cylindres).
Les critères de vérification de la tangence sont stricts. Assurez-vous que les composants sont géométriquement tangents.
Insérez des liaisons roulantes cylindre/cylindre à 2 contraintes pour imposer et conserver la tangence entre les deux cylindres. La contrainte de tangence génère une charge normale.
L'option sélectionnée par défaut est 2 contraintes : roulement et tangente.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant le premier cylindre.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez le premier cylindre.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
L'origine du système de coordonnées de liaison du premier composant est le point où celui-ci est lié au deuxième composant.
- Sélectionnez l'axe X.
- Sélectionnez le premier cylindre.
- Répétez l'étape 3 pour le composant comprenant le deuxième cylindre.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser X pour inverser la direction de l'axe X de l'un ou l'autre des composants.
- Cliquez sur OK.
Si vous insérez une liaison à 1 contrainte alors que les cylindres ne sont pas tangents, le logiciel vous avertit que la distance entre les deux axes n'est pas égale à la somme des rayons.
Si vous insérez une liaison à 2 contraintes et que les cylindres sont tangents, le logiciel vous avertit que le mécanisme comporte un degré de redondance.
Roulement : cylindre dans cylindre
Pour ces liaisons, le deuxième composant doit se déplacer suivant un mouvement plan par rapport au premier composant.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cylindre dans cylindre.
- Dans la boîte de dialogue Insérer une liaison, cliquez sur 1 contrainte : roulement ou sur 2 contraintes : roulement et tangente.
Insérez des liaisons roulantes cylindre dans cylindre à 1 contrainte lorsque les deux cylindres sont déjà correctement placés et que la tangence est garantie pendant toute la simulation. Les deux cylindres sont correctement placés lorsque l'axe Z du cylindre interne est à une distance fixe (égale au rayon du cylindre interne) de la surface interne du cylindre externe.
Les critères de vérification de la tangence sont stricts. Assurez-vous que les composants sont géométriquement tangents.
Insérez des liaisons roulantes cylindre/cylindre à 2 contraintes pour imposer et conserver la tangence entre les deux cylindres. La contrainte de tangence génère une charge normale.
L'option sélectionnée par défaut est 2 contraintes : roulement et tangente.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant le cylindre externe.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez le cylindre externe.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
L'origine du système de coordonnées de liaison du premier composant est le point où celui-ci est lié au deuxième composant.
- Sélectionnez l'axe X.
- Sélectionnez le cylindre externe.
- Répétez l'étape 3 pour le composant comprenant le cylindre interne.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser X pour inverser la direction de l'axe X de l'un ou l'autre des composants.
- Cliquez sur OK.
Si vous insérez une liaison à 1 contrainte et que les cylindres ne sont pas tangents, le logiciel vous avertit que la distance entre les deux axes n'est pas égale à la somme des rayons.
Si vous insérez une liaison à 2 contraintes et que la tangence des cylindres est déjà assurée par le reste de la chaîne cinématique, le logiciel vous avertit que le mécanisme comporte un degré de redondance.
Roulement : cylindre-courbe
Pour ces liaisons, le deuxième composant doit se déplacer suivant un mouvement plan par rapport au premier composant.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cylindre-courbe.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant la courbe.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez la face courbe, une arête ou un contour fermé sur une esquisse.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'arête de la courbe.
- Sélectionnez la face courbe, une arête ou un contour fermé sur une esquisse.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant le cylindre.
- Sélectionnez le cylindre.
- Sélectionnez l'origine du système de coordonnées de liaison.
- Cliquez sur OK.
Courroie
Pour ces liaisons, les axes de rotation des deux composants doivent être parallèles, c'est-à-dire que la liaison agit entre deux poulies situées sur le même plan. La liaison de courroie fonctionne uniquement si la distance entre les centres des deux cylindres est fixe.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Courroie.
- Dans la boîte de dialogue Insérer une liaison, sélectionnez une courroie droite ou une courroie croisée.
La courroie par défaut est croisée.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant le premier cylindre.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez le premier cylindre.
L'axe du cylindre doit être l'axe Z du système de coordonnées de la liaison.
Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
L'origine du système de coordonnées de liaison du premier composant est le point où celui-ci est lié au deuxième composant.
- Sélectionnez l'axe X.
- Sélectionnez le premier cylindre.
- Répétez l'étape 3 pour le composant comprenant le deuxième cylindre.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser X pour inverser la direction d'un axe X.
- Cliquez sur OK.
Roulement : cône sur plan
Pour cette liaison, le cône doit être tangent au plan. Utilisez d'autres liaisons pour conserver la tangence pendant la simulation.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cône sur plan.
- Dans la fenêtre graphique, sélectionnez le plan.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du plan.
- Sélectionnez le cône.
Le logiciel place automatiquement les deux systèmes de coordonnées de liaison.
- Cliquez sur OK.
Roulement : cône sur cône
Pour ces liaisons, le deuxième cône doit être tangent au premier cône. Utilisez d'autres liaisons pour conserver la tangence pendant la simulation.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cône sur cône.
- Dans la fenêtre graphique, sélectionnez le premier cône.
Si le composant sélectionné ne contient pas de cône, la simulation dynamique en génère un dont la base et le rayon (R1) sont automatiquement sélectionnés. Le sommet se trouve à l'intersection des axes Y des systèmes de coordonnées des deux composants.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez l'axe Y ou un cône.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
- Sélectionnez l'axe Y ou un cône.
- Sélectionnez l'axe Y du système de coordonnées de liaison du composant comprenant le deuxième cône.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser Y pour inverser la direction d'un axe Y.
- Cliquez sur OK.
Roulement : cône dans cône
Pour ces liaisons, le cône interne doit être tangent au cône externe. Utilisez d'autres liaisons pour conserver la tangence pendant la simulation.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Roulement : cône dans cône.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant le cône externe.
Si le composant sélectionné ne contient pas de cône, la simulation dynamique en génère un dont la base et le rayon (R1) sont automatiquement sélectionnés. Le sommet se trouve à l'intersection des axes Y des systèmes de coordonnées du premier et du deuxième composant.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez l'axe Y.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
- Sélectionnez l'axe Y.
- Sélectionnez l'axe Y du système de coordonnées de liaison du cône interne.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser Y pour inverser la direction d'un axe Y.
- Cliquez sur OK.
Vis
Comme d'autres liaisons roulantes, les liaisons de vis agissent entre des composants qui ont déjà des degrés de liberté relatifs entre eux. La liaison de vis couple un degré de liberté de rotation et un degré de liberté de translation. Par défaut, avant la création de la liaison de vis, le logiciel crée un pivot glissant pour fournir les deux degrés de liberté entre les deux composants.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Vis.
- Dans la boîte de dialogue Insérer une liaison, cliquez sur Créer un pivot glissant si vous voulez que le logiciel crée au préalable un pivot glissant entre les deux composants.
Un pivot glissant doit être créé entre les deux composants pour pouvoir insérer une liaison de vis.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du premier composant.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez l'axe Z, c'est-à-dire l'axe des degrés de liberté de translation et de rotation.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette action facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
L'origine du système de coordonnées de liaison du premier composant est le point où celui-ci est lié au deuxième composant.
- Sélectionnez l'axe X.
- Sélectionnez l'axe Z, c'est-à-dire l'axe des degrés de liberté de translation et de rotation.
- Répétez l'étape 3 pour le deuxième composant.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser Z ou sur Inverser X pour inverser respectivement la direction d'un axe Z ou celle d'un axe X.
- Entrez le pas de la vis.
- Cliquez sur OK.
Engrenage à vis sans fin
Comme d'autres liaisons roulantes, les liaisons d'engrenage à vis sans fin agissent entre des composants qui ont déjà des degrés de liberté relatifs entre eux. La liaison d'engrenage à vis sans fin couple deux degrés de liberté de rotation qui sont perpendiculaires entre eux.
- Dans le menu Type de liaison ou dans la table des liaisons, sélectionnez Engrenage à vis sans fin.
- Dans la fenêtre graphique, spécifiez le système de coordonnées de liaison du composant comprenant l'engrenage.
Pour un composant donné, le système de coordonnées de composant doit différer du système de coordonnées de liaison.
Le logiciel exprime les résultats dans le système de coordonnées de liaison du premier composant.
- Sélectionnez l'axe Z.Conseil : Si vous avez du mal à sélectionner l'entité géométrique, cliquez sur, puis sélectionnez le composant dans la fenêtre graphique. Cette fonction facilite la sélection d'une entité du composant.
Bien qu'il ne soit pas toujours nécessaire de sélectionner des entités géométriques supplémentaires pour indiquer le système de coordonnées de liaison, il est souhaitable de l'indiquer le plus précisément possible.
- Sélectionnez l'origine du système de coordonnées de liaison.
L'origine du système de coordonnées de liaison du premier composant est le point où l'engrenage est lié à la vis.
- Sélectionnez l'axe X.
- Sélectionnez l'axe Z.
- Spécifiez le système de coordonnées de liaison du composant comprenant la vis.
- Sélectionnez l'axe Z.
- Sélectionnez l'origine du système de coordonnées de liaison.
- Sélectionnez l'axe X.
- Au besoin, dans la boîte de dialogue Insérer une liaison, cliquez sur Inverser Z ou sur Inverser X pour inverser respectivement la direction d'un axe Z ou celle d'un axe X.
- Entrez le pas de la vis.
- Cliquez sur OK.
 Démonstration de la création d'une liaison cylindrique roulante
Démonstration de la création d'une liaison cylindrique roulante