Le mécanisme défini jusqu'à maintenant est sans perte : il fonctionne sans le frottement et l'amortissement qui s'appliqueraient normalement. Vous allez à présent ajouter un frottement afin de refléter l'environnement de fonctionnement.
Ajoutez un frottement et terminez la connexion fourche-guide.
- Dans le navigateur, cliquez avec le bouton droit de la souris sur Blade set.iam, puis choisissez Flexible. En définissant l'ensemble en tant que flexible, celui-ci sera placé dans le dossier des groupes soudés. Les contraintes sont calculées à l'intérieur de cet ensemble et la contrainte entre la fourche et les lames entraîne l'ajout d'une liaison de révolution.
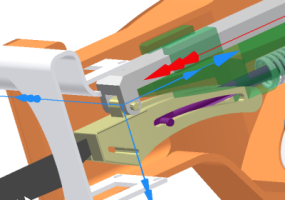
- Comme indiqué précédemment, l'ensemble ne comporte pas encore de frottement. Dans cette étape, un frottement est imposé à la liaison à glissière. Cliquez avec le bouton droit de la souris sur la liaison à glissière du guide et du composant Scottish Yoke, puis choisissez Propriétés.
- Cliquez sur l'onglet du degré de liberté 1 (T).
- Cliquez sur la commande Modifier la force de liaison
 .
. - Cliquez sur Activer la force de la liaison.
- Saisissez un coefficient de frottement sec de 0.1 et cliquez sur OK.
- Vous devez à présent ajouter une contrainte de manière à positionner le composant Scottish Yoke par rapport à l'ensemble de manivelle. Quittez l'environnement de simulation et cliquez sur l'onglet Ensemble.
- Définissez la vue de navigateur sur Modèle et développez le noeud Blade set.iam.
- Développez le noeud Scottish Yoke et cliquez sur la commande Contrainte.
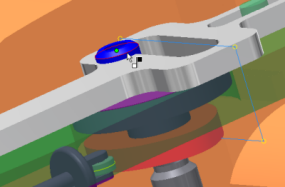
- Dans le navigateur, sélectionnez Plan de construction 3 sous le composant Scottish Yoke.
- Dans la fenêtre graphique, sélectionnez une arête circulaire du composant Roller appartenant à l'ensemble Crank cam. Une liaison ponctuelle est ajoutée pour représenter la contrainte.
- Cliquez sur OK pour ajouter la contrainte et fermer la boîte de dialogue.
- Redéfinissez l'affichage du navigateur sur Simulation dynamique.
Cette liaison comporte cinq degrés de liberté et une contrainte. Une telle définition est suffisante pour transmettre le mouvement sans surcontraindre le modèle. La simulation dynamique détecte les conditions de surcontrainte et vous aide à les résoudre.