ウェイトを最適化しやすくするために、モデル コンポーネントの幅に関係するさまざまなジオメトリ設定を生成します。最初に、シミュレーション パラメータとして使用するモデル パラメータを表示します。
- シミュレーション ブラウザで、[Robot Base.iam]ノードを展開し、アセンブリ内のコンポーネントを表示します。base_plate:1 を右クリックし、[パラメータを表示]をクリックします。
- [パラメータを選択]ダイアログ ボックスで、MemberWidth パラメータの横にあるチェック ボックスをオンにして、そのパラメータをパラメトリック テーブルに含めます。
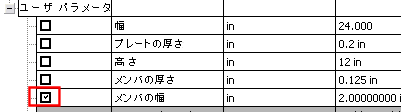
- [OK]をクリックします。
パラメータ範囲を定義します。
- リボン バーの[管理]パネルで、[パラメトリック テーブル]
 をクリックします。
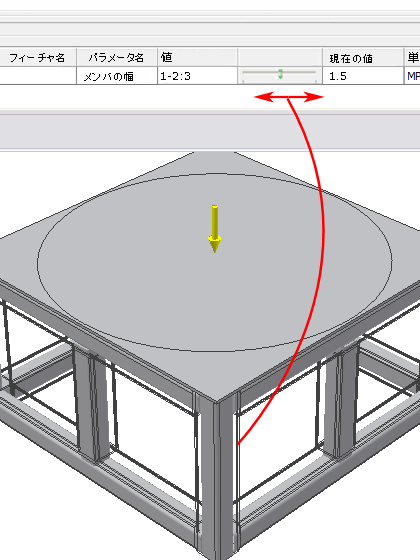
をクリックします。 - [パラメータ]セクションの[base_plate.ipt]行で、MemberWidth パラメータに関して、[値]セルに 1-2 と入力します。[Enter]キーを押して行の内容を更新します。

パラメータが定義されたら、パラメトリック設定を生成します。
- [パラメータ]セクションで[MemberWidth]行を右クリックし、[すべての形状を作成]を選択します。
- 生成された設定は、[現在の値]スライダーを使用して表示できます。