ローカル座標系(LCS: Local Coordinate System)はモデルの各ノードに関連する X、Y、Z 軸の組合せです。拘束および荷重を 1 方向に簡素化して割り当てるために、ローカル座標系を使用することが好ましい場合があります。
定 義
ローカル座標系を定義するには、モデルで 3 つの参照点またはノードが必要です。次のように所定の 3 つの参照位置を X、Y、Z 軸に定義します。
- エンティティ 1 は原点を定義する。
- エンティティ 2 はローカル X 方向を定義する。
- エンティティ 3 は XY 平面を定義し、ローカル Y 軸がエンティティ 3 から最も近い位置を通過している。
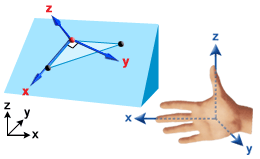
ローカル Z 方向は XY 平面に垂直であるように定義され、ローカル座標系は「右手」座標系と言えます。""
右手座標系では、右手の親指が Z 方向、その他の伸ばした指が X 方向、手の平がローカル Y 方向を定義します。