[接触ペアの高度なコントロールとパラメータ]ダイアログ ボックスには、[接触ペアのコントロールとパラメータ]ダイアログ ボックスの[高度]ボタンをクリックしてアクセスします。[接触ペアの高度なコントロールとパラメータ]ダイアログ ボックスでは、接触ペアに関するパラメータを個別に指定できます。
[一般]タブ
接触剛性
[接触剛性]ドロップダウン ボックスでは既定で[自動]が選択されています。サーフェス間接触の接触剛性は次の方程式に基づいて計算されます。

ここで
- f s は、尺度パラメータ(既定値は 0.1)です。
- E は、接触ペアの 2 つのパーツの最小ヤング率です。
- A は、接触線と接触の厚さ(2D)または表面積(3D)の乗算です。
- V は、要素の面積と要素の厚さ(2D)または体積(3D)の乗算です。
比率 A2/V は、ターゲット サーフェスと接触サーフェスの両方の要素について計算されます。サーフェス間接触タイプの場合は、比率の平均値が算出されます。その他の接触タイプの場合は、ターゲット サーフェスの比率値が使用されます。ビーム要素またはトラス要素に関連する接触の場合、この比率の値には 1.0 が使用されます。
接触剛性に指定値を使用するには、[接触剛性]ドロップダウン ボックスで[ユーザ指定]オプションを選択し、[接触剛性]フィールドに適切な値を入力します。[追加の接触剛性]に値を入力すると、サーフェスが互いに干渉している場合に、この値が[接触剛性]の値に加算されます。 図 1 を参照してください。
|
|
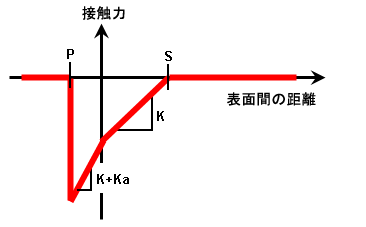
| 図 1: 接触剛性と接触距離 |
|
サーフェス間の距離が接触距離(S)を下回ると、2 つのサーフェスは接触状態になります。この距離より短くなると、各要素の接触力は圧縮量(S – 距離)と接触剛性(K)に比例します距離が 0 に減少すると、パーツが互いに通過(くい込み)し始めます。その場合、接触力は接触剛性と追加の接触剛性(Ka)の和およびくい込み量に比例します。サーフェス間の距離が最大くい込み距離(P)に達すると、接触力はゼロになります。 |
接触する 2 つの材料が比較的柔軟な場合、接触剛性の値は、一般的にヤング率の 1 ~ 10% (「単位」メッシュ サイズ)の範囲で指定する必要があります。メッシュ サイズが大きすぎるか小さすぎる場合は、値をパーセント単位で少し減少または増加して調整する必要があります。仮定する剛性が低すぎると、過度な接触くい込みが発生します。剛性が高すぎると、接触の振動が発生したり、接触が不安定になる可能性があります。
接触剛性の別の推定方法として、接触要素を 2 サーフェスの節点間における一連のばねと捉える方法があります。 接触力が既知の場合(近似値でも構いません)、接触剛性は K=(F/n)/Δ から計算できます。ここで、F は接触力、n は接触の節点数、Δ は力 F/n に抵抗する接触要素の圧縮量です。この場合、力が発生する程度まで接触要素が圧縮されている必要がある点に留意してください。接触距離(S)の 10% の Δ から開始するのが妥当です。ただし、この方法は、ジオメトリが長方形の単純な接触モデルの場合にしか実用的でない場合があります。
[1 番目のステップの後に適応可能な接触剛性法を使用]チェック ボックスをオンにすると、解析時に接触剛性が自動的に調整され、精度と収束性が向上します。接触剛性は、接触の状態(くい込みの有無)に基づいて調整されます。この方法を使用すると、解析の精度と効率性が向上する場合があります。相互に高速で移動しているパーツ間、または非線形材料モデルで構成されるパーツ間で接触があるモデルについては、このチェック ボックスをオフにする必要が生じる場合があります。
剛性が低すぎると、マスターサーフェスに対する節点の大きなくい込みが発生します。剛性が高すぎると、接触領域に対するジオメトリの境界条件は完全に満たされますが、平衡反復が不安定になる可能性が非常に高くなります。接触剛性に高い値を指定すると、全体の剛性マトリックスの条件に誤りが生じ、収束の質が低くなります。
接触が発生する条件(接触距離)
接触距離は、既定でモデルのジオメトリに基づいて計算されます。接触距離は、接触が発生するサーフェス間の距離です(図 1 を参照)。この距離よりも 2 つのサーフェス間の距離が短くなると、接触剛性が適用されます。接触距離に指定値を使用する場合は、[接触距離]ドロップダウン ボックスで[ユーザ指定]オプションを選択し、[接触距離]フィールドに適切な値を入力します。くい込みを回避するには、相当大きな値を接触距離として設定するのが最適な方法です。
接触距離がサーフェス間の初期ギャップよりも大きい場合、干渉が生じ(サーフェス間接触および点サーフェス間接触のみ)、解析の開始時点でボディを分離しようする接触力が発生します。このような場合、一般的に解析の開始時点において、パーツが再び平衡状態になるまで時間ステップを減らします。
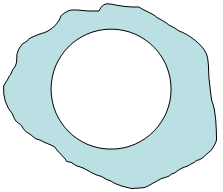
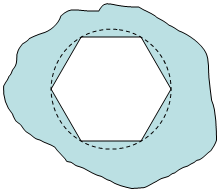
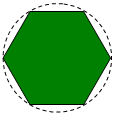
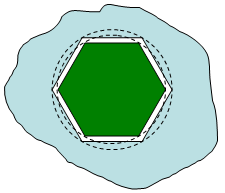
穴の中のシャフトやピンなど、密集した移動パーツの場合は特別な配慮が必要です。数学的には、パーツ間のギャップは物理的なギャップより小さくすることができます。数学的なギャップは、メッシュのサイズとサーフェスの近似により決定します。物理的なギャップは、パーツの寸法に基づきます。近似されたサーフェスが移動または回転すると、現実には存在しないような干渉も起こりえます。図 2 を参照してください。
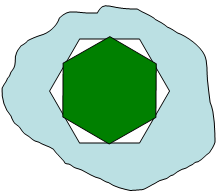
図 2: パーツのメッシュ作成時のクリアランスと干渉
|
1. パーツ内の穴 |
メッシュ作成するとポリゴンに変化 |
|
2. 円形ピン |
メッシュ作成するとポリゴンに変化 |
|
3. 組み合わせると、ある位置では干渉が発生せずに 2 つのパーツがフィット |
別の位置では、(物理的なパーツにクリアランスがあっても)干渉が発生。これは、サーフェスの近似が原因 |
メッシュ作成したパーツ間に物理的なパーツと同じクリアランス(または干渉)を実現するには、適切な挙動が得られるようパーツの寸法と接触距離を調整する必要があります。これらは、図 3 に示すようにメッシュ サイズを基準にします。

図 3: 干渉の発生回避に向けた穴内部のピンの関係
基本ジオメトリから、直径 D を平面 F 全体の寸法に関連付けることができます。
![]()
干渉フィットの発生を回避するには、この関係に基づいて寸法を設定する必要があります。
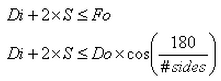
ここで
- D、Di、および Do は物理的な寸法(実際または理論上の寸法)
- F、Fi、および Fo は平面全体の(メッシュでの近似による)寸法
- # sides は、外辺部の辺または要素の数。外辺部のメッシュが均一である場合、この値は明らかです。メッシュ細分化節点を使用する場合など、メッシュが不均一である場合、# sides は、精細度の最も低いメッシュを外辺部全体に使用した場合の辺数に基づく仮定の値です。別の方法として、メッシュの最大寸法 Fo を測定することもできます。
- S は、ピンのコーナーと穴の平面間における数学的なクリアランスです。サーフェス間接触の距離をこの寸法と同じ値に設定すると、ピンと穴の一部の位置におけるクリアランス ギャップは 0 になります。
たとえば、直径 2.010 インチの穴の内側にある直径 2 インチのピンに対して、40 個の要素でメッシュを作成するとします。この場合、数学的なクリアランス S は 0.0019 になり、各辺の理論上の 0.005 インチのクリアランスよりも大幅に小さくなります。0.002 インチの接触距離でクリアランスを 0.005 インチにするには、S = 0.007 インチおよび内径を 1.9898 インチの直径にする必要があります。
[ジオメトリ]タブ
接触をチェックする条件
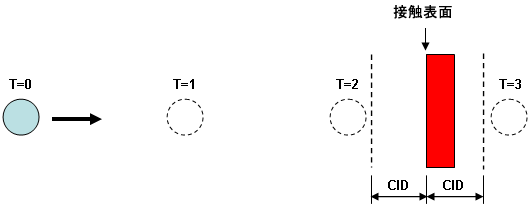
計算の処理速度を上げるには、[接触間距離]を指定します。この場合、2 つのサーフェス間の距離が指定値より短い場合にのみ接触と見なされます。したがって、プロセッサで 2 つのパーツが十分離れていると認識された場合、接触状態の有無をチェックするステップは省略されます。パーツが実際に互いに通過していても、各計算ステップでパーツが接触状態にならないようにするために、ステップ間でのパーツの移動距離はあまり大きくならない点に注意する必要があります。この条件の場合、接触は検出されなくなります。図 4 を参照してください。値が 0 (一部のケースで有効ですが、高速のアプリケーションではほとんど有効に機能しません)は、接触距離がパーツのサーフェス要素の最大寸法と等しいことを示します。
|
|
|
図 4: 接触間距離 高速で移動する球を 4 つの時間ステップ(T=0、1、2、3)で示します。接触は、物体が各接触間距離(寸法 CID)の範囲内にある場合にのみチェックされます。この例の場合、球はすべての時間ステップで接触間距離の外側にあるため、球がブロックを通過しても検出されません。 |
パーツが互いに干渉する条件:
接触ペアの第 1 パーツの真下にある第 2 パーツのサーフェス上の点が[最大くい込み距離]の値より大きい場合、サーフェス接触は適用されません。(この場合、接触力はゼロになります。図 1 を参照してください)。このフィールドは、一次サーフェスの真下にある二次サーフェス上の点間で虚偽の接触が適用されるのを防止する目的で使用します。このフィールドの値が 0.0 の場合、局部座標系での最大くい込み距離としてサーフェス要素の最大寸法が使用されます。このフィールドには、基本的に 0.0 以外の値を指定しないことをお勧めします。
接触要素数の制限
パーツ間の移動が大きく行われる場合、時間ステップごとに実際に接触している点をプロセッサで特定するには、(サーフェス間接触のメイン ダイアログ ボックスを使用して)接触を自動更新するのが最適な方法です。ただし、パーツ間の運動がほとんどない場合、生成される接触要素の数を最小限に抑えると、解析時間を短縮できます。初期状態で[最大初期距離]の値よりも間隔が離れている要素の間に接触は作成されません。したがって、要素の移動がどれだけ近くても、要素間で接触は発生しません。これにより、接触のチェック回数が制限され、解析時間が短くなります。
ヨークとクレビス内にピンがあるとします。ヨークに対してピンが回転しない場合、ピンの左側は穴の右側と接触しません。したがって、最大初期距離を小さな距離(1 つの要素のサイズなど)に設定すると、隣接する節点にある穴とピンを接続するのに十分な接触要素が作成されます。これにより、モデルのサイズが小さくなり、接触要素の状態をチェックする回数が少なくなり、解析の処理時間が短くなります。
接触サーフェスの拡大
サーフェス間接触は、要素のサーフェスが要素の面に対して垂直に拡張したものと考えることができます。サーフェスが凸形の場合、接触形状が挟まり込むギャップが、2 つの隣接する要素間に残ります。また、ターゲット節点が接触せずに移動する場合があります。このため、接触する隣接要素間でターゲット節点が移動すると、振動音が鳴ります。図 5a を参照してください。[接触要素側を拡張]ドロップダウン ボックスで[自動]オプションを選択すると、このようなギャップを考慮して接触要素の境界がわずかに拡張されます。図 5b を参照してください。[自動]オプションを選択した場合、プロセッサで拡張が必要な条件を検出し、必要に応じて長さを延長します。長さを延長しない場合は、[回避]オプションを選択します。
|
ターゲット接触節点
2 つの接触領域 (過度に拡張)
|
拡張された 2 つの接触領域 |
|
(a) 接触要素を拡張しない場合、ターゲット節点がサーフェスを横切ってスライドするため、要素間の接触が円滑に行われません。 |
(b)接触要素を拡張する場合、ターゲット節点が接触要素間でスライドするため、より円滑に接触領域が作成されます。 |
|
図 5: 接触面の拡大 |
|
接触表面を平滑化する
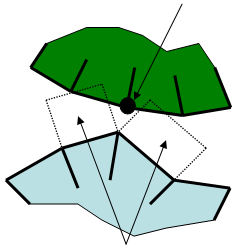
接触サーフェスに滑らかさが欠如している場合、2 つの問題が生じます(滑らかさは、2 つの隣接する要素間における法線方向の変化の度合いを示します)。第 1 の問題は収束の質の低下、第 2 の問題は結果の質の低下です。隣接する 2 つの要素が曲面などのように同一平面上にない場合、ターゲット節点が要素の境界を超えて移動すると、接触力の法線ベクトルの方向が突然変化します。ジオメトリが不連続であることを考慮すると、こうした状況は避けられません。滑らかさが欠如していることにより、要素の境界を越えて振幅が生じたり、ターゲット節点が要素の境界に挟まり込む場合があります。
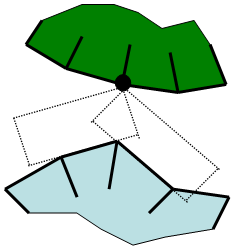
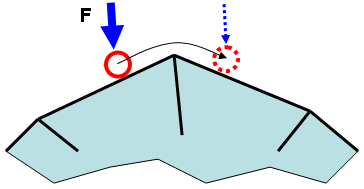
このような状況を最小限に抑えるために、[接触要素側を拡張]ドロップダウン ボックスを[平滑化]に設定します。このオプションを選択すると、[平滑化因子 (0-0.5)]フィールドが有効になります。平滑化因子は、2 つの要素のコーナー(または同じ要素の 2 つの辺)にフィレットを配置することであると捉えることができます。解説のために図 6 を参照してください。平滑化因子は、0 (平滑化を行わない)~ 0.5 (要素のエッジの半分にまで遷移区間を延長する)の範囲の値です。
平滑化は、2 つの異なる接触サーフェスの接合部では行われません。各接触サーフェスの境界内でのみ行われます。
|
(a) 別の形状(この図には表示されていません)のターゲット節点(赤い円)が左から右への移動中に力 F により接触しています。要素間で節点が移動すると、反力の方向が即座に変化し、収束が困難になる場合があります。 |
|
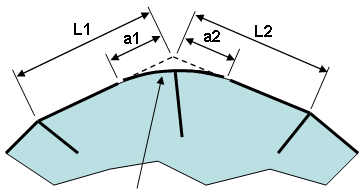
円滑な遷移 (b)[平滑化]オプションを有効にすると、鋭いコーナーが除去されます。これにより、節点(図を見やすくするため省略しています)が左から右に移動するときに、反力の方向が滑らかに変化します。距離 a1 と a2 は次のように計算されます。 a1 = 平滑化因子 * L1 a2 = 平滑化因子 * L2 |
| 図 6: 接触サーフェスの平滑化 |
サーフェス間接触では、サーフェス上の節点が別のサーフェスの面を通過しているかどうかを常にチェックしています。このため、サーフェス A の節点は平滑化されたサーフェス B に接触し、サーフェス B の節点は平滑化されたサーフェス A に接触します。ただし、平滑化されたサーフェス A は平滑化されたサーフェス B に技術的に接触しません。
接触要素更新パラメータ
接触要素が毎回作成される際の半径を[探索半径]フィールドで指定します。このフィールドは、[サーフェス間接触]ダイアログ ボックスの[接触要素更新パラメータ]領域の[更新]ドロップダウン ボックスで[ユーザ定義]を選択した場合にのみ有効になります。
[時間ステップ]タブ
[自動時間ステップ低減法を開始]チェック ボックスをオンにした場合、[時間ステップの低減のための目標距離]フィールドで指定した距離よりも 2 つのサーフェス間の距離が近くなると、時間ステップが自動的に低減されます。時間ステップを低減する利点として、接触の発生時に必要となる時間ステップが小さくなることが見込める点、および発生前に接触を少なくできる点が挙げられます。([時間ステップの低減のための目標距離]の効果は、接触距離を考慮せずに実際のサーフェスを分離する場合の効果と基本的に同じです)。時間ステップは、最低でも[接触に対する最小時間ステップ サイズ]フィールドで指定した値にまで低減されます(時間ステップの低減は現在の時間ステップを整数で除算することで行われるため、通常はこのフィールドの値よりも小さな値にまで低減されます)。[接触に対する最小時間ステップ サイズ]フィールドで 0 を指定すると、最小時間ステップは、現在の時間ステップを 10 で除算した値になります。
[自動時間ステップ低減法を開始]をオフにすると、平衡および接触の収束を維持するのに必要な場合に限り、時間ステップが低減されます。