非線形解析に含まれる接触のタイプは、さまざまです。たとえば、次のようなタイプがあります。
- 衝撃面
- パーツの間のサーフェス間接触
- 接触、一般接触、連成要素のタイプ
- 湾曲材料モデルのトラスによる模擬的なギャップ要素
非線形静的解析で使用する場合、モデルのすべてのパーツは、すべての時間ステップ、すべての反復において、接触に依存することなく、静的に安定でなければならない点に注意してください。 この要件を満たさない場合、解析の収束が遅くなったり、実行に失敗するとがあります。
モデルの安定化
パーツが他のパーツと干渉するまで自由に移動できる場合、これらの自由なパーツは弱いばねで拘束される必要があります。その目的は、すべてのパーツの安定性を確保しながらも、プロセス中にはそれらが大きな距離を移動できるようにすることです。特定の反復で接触を考慮しない場合、プロセッサが解を計算できるようにパーツが弱いばねで保持されますが、プロセッサはなんらかの接触が起こったことを検出し、次の反復に進み、接触を含めることもできます。この弱いばねは実際には存在しないため、結果への影響が最小になるように剛性を設定する必要があります。ばねを介してモデルからグランドに移動する荷重は、与えられた荷重のごく一部でなければなりません。 図 1 を参照してください。
場合によっては、いくつかの方向に境界条件を使用して、パーツの移動を防止することもできます。たとえば、クレビスの内側のピンでは、軸方向の境界条件を使用して、安定性を確保できます。弱いばねは、他の方向、すなわち接触が起こる方向に使用され、安定性を確保しつつ、ピンは接触に移行することができます。
弱いばね要素を追加するための詳細な手順を次に示します(ここでは、結合されるパーツの任意の数だけサブアセンブリが定義されます)。
- 接触によって部分的または単独で拘束されるサブアセンブリの場合、新しいパーツ番号にラインを描画してください([ジオメトリ] > [追加] > [ライン])。[構造体として使用する]オプションが選択されていないことを確認し、[ライン]ダイアログの[関連性使用]オプションをアクティブ化してください。
- X、Y、Z の各方向に 1 つずつ、3 つの線のセットを追加し、サブアセンブリ上の節点に連結してください。すべての方向の安定性を確保するには、一直線上にない 3 つの任意の節点に線のセットを追加してください(サブアセンブリのいくつかの方向が境界条件によって拘束されている場合、使用する節点は 3 つ未満でもかまいません。ばね要素の目的は、3 つの並進と 3 つの回転という 6 つの方向でパーツを静的に安定させることです)。 ばね要素が運動を妨げない場合、ラインの長による解析への影響は無視できます。
- ばねの自由端の各節点を選択([選択] > [選択] > [頂点])し、右クリックから[追加] > [節点境界条件]を選択してください。 境界条件を[固定]に設定してください。
- ツリー表示の[要素タイプ]エントリを右クリックし、[バネ]を選択してください。
- ツリー表示の[要素定義]エントリを選択し、[要素定義を編集]を選択してください。 [バネ剛性]フィールドに値を入力してください。ばねは、グランドに連結されているため、加えられた荷重の一部がグランドに伝達します。モデルから移動する荷重の量を最小にするには、次のようにして適切な剛性を計算してください。節点で発生するたわみを推定し、加えられた荷重の一部(たとえば 0.1%)がばねを介して伝達されると仮定します。剛性は、「荷重/たわみ」として計算できます。 たとえば、加えられた荷重が 1000 lbs で、ばね要素によって伝達される荷重が 1 lb (パーツの接触前)とし、ばねの位置においてモデルが 0.05 インチたわむと推定する場合、許容可能な剛性は F/d = (1 lb)/(0.05 インチ) = 20 lb/in となります。
- 必要に応じて、モデル内の他のサブアセンブリについても繰り返してください。
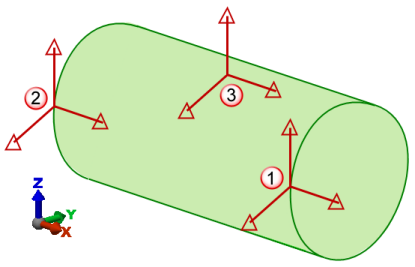
図 1: ピン上の 3 組のばねによって安定性を確保
ピンがクレビス内で接触状態に保持されているとします(見やすさを考慮して、クレビスは示していません)。 1 および 2 のばねにより、ピンの X、Y、Z 方向の並進と、Y および Z 回りの回転が防止されますが、X 軸(厳密には、1 および 2 の位置で節点を連結している線)の回りの回転は防止されません。 この回りの回転は、3 のばねによって防止されます(厳密には、点 3 における X および Y 方向のばねは不要ですが、便宜上の理由で含まれています)。
解析後
モデルのいずれかのパーツの安定化のためにばね要素が使用された場合、[結果]環境を使用して、ばね要素内の軸力を確認してください([結果] > [要素力およびモーメント] > [軸力])。 軸力の大きさは、モデルに加えられた荷重と比べて十分に小さくなければなりません。