기본적으로 다이나믹 시뮬레이션을 수행할 때 조립품에 존재하는 특정 구속조건은 자동으로 접합으로 변환됩니다. 그러면 접합을 작성할 때 부품에 대한 광범위한 작업을 생략할 수 있습니다.
주: 다이나믹 시뮬레이션에서는 메이트 구속조건, 삽입 구속조건 등 자유도와 관련된 구속조건을 변환하지만 각도 구속조건과 같이 위치와 관련된 구속조건은 변환하지 않습니다.
튜토리얼 파일 열기
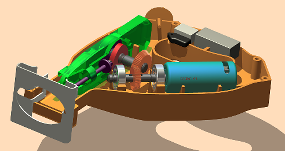
- 활성 프로젝트를 tutorial_files로 설정한 다음 Reciprocating Saw.iam을 엽니다.
- 다른 이름으로 저장 명령을 사용하고 새 파일에 RecipSaw-saved.iam과 같은 이름을 지정합니다.
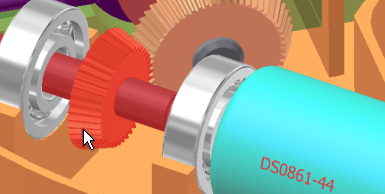
- 조립품이 어떻게 움직이는지 보려면 모터 끝에 베벨 기어를 끌어 둡니다. 기어는 회전하지만 운동 사슬에 있는 다른 구성요소는 회전하지 않습니다.
다음 연습들을 실행하면서 이 조립품을 주기적으로 저장합니다.