매커니즘에서 거의 손실이 발생하지 않습니다. 즉, 일반적으로 경험하는 것처럼 마찰 또는 댐핑 없이 작동됩니다. 이제 마찰을 추가하여 작업 환경을 캡처합니다.
마찰 추가 및 이음쇠 안내 관계 완료
- 검색기에서 Blade set.iam을 마우스 오른쪽 버튼으로 클릭하고 유연성을 클릭합니다. 조립품을 유연성으로 설정하여 용접 그룹 폴더에 조립품을 배치합니다. 해당 조립품 내에서 구속조건이 평가되고 이음쇠와 칼날 간의 구속조건으로 인해 회전 접합이 추가됩니다.
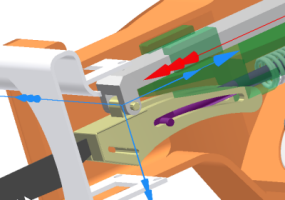
- 이전에 언급한 것처럼 아직 조립품에는 마찰이 없습니다. 이 단계에서는 각기둥 접합에 마찰을 부과합니다. 안내 및 Scottish Yoke의 각기둥 접합을 마우스 오른쪽 버튼으로 클릭하고 특성을 클릭합니다.
- dof 1 (T) 탭을 클릭합니다.
- 접합력 편집 명령
 을 클릭합니다.
을 클릭합니다. - 접합력 작동을 클릭합니다.
- 건조 마찰계수로 0.1을 입력하고 확인을 클릭합니다.
- 이제 크랭크 조립품을 기준으로 Scottish Yoke를 배치하려면 구속조건을 추가해야 합니다. 시뮬레이션 환경을 종료하고 조립품 탭을 클릭합니다.
- 검색기 보기를 모형으로 설정하고 Blade set.iam 노드를 확장합니다.
- Scottish Yoke 노드를 확장하고 구속 명령을 클릭합니다.
- 검색기의 Scottish Yoke 구성요소 아래에서 작업 평면3을 선택합니다.
- 그래픽 창에서 크랭크 캠 조립품의 일부인 롤러 구성요소의 원형 모서리를 선택합니다. 구속조건을 반영하도록 점-평면 접합이 추가됩니다.
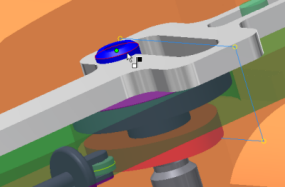
- 확인을 클릭하여 구속조건을 추가하고 대화상자를 닫습니다.
- 검색기 뷰를 다이나믹 시뮬레이션으로 다시 설정합니다.
결과 점-평면 접합에는 5개의 자유도와 하나의 구속조건이 있습니다. 이는 모형을 구속하지 않고 동작을 전송하기에 충분한 정의입니다. 다이나믹 시뮬레이션에서는 과도하게 구속된 조건을 탐지하여 해당 조건을 해석하도록 지원합니다.