Kolejna relacja, którą należy utworzyć, to relacja między Wałkiem popychacza krzywki a komponentem krzywki. Wałek ten musi stykać się z krzywką.
Utrzymanie stopnia swobody
Wałek popychacza jest częścią symetryczną i domyślnie symulacja dynamiczna stara się zredukować symetryczny ruch komponentu. Dlaczego? Wyjaśni to następujący przykład.
Pomyśl o zespole koła. Opona zamontowana jest na feldze. Zespół ten jest przymocowany do pojazdu za pomocą nakrętki koła. Funkcją tej nakrętki, do celów symulacji, nie jest obracanie się wokół osi; ma ona mocować zespół do pojazdu. Ponieważ nakrętka koła jest komponentem symetrycznym, obrotowy stopień swobody (DOF) jest automatycznie usuwany. Upraszcza to model do celów symulacji. Jeśli chcesz zachować obrotowy stopień swobody nakrętki koła, możesz to zrobić używając polecenia Utrzymaj stopień swobody. Działa to także w odwrotny sposób. Można użyć opcji Ignoruj stopień swobody, aby ograniczyć stopnie swobody komponentu.
Aby upewnić się, że Wałek popychacza ma kontakt z krzywką przy jednoczesnym zachowaniu jego stopnia swobody:
- W folderze Grupy ruchome rozwiń grupę Spawane. W grupie znajdują się dwa komponenty.
- Kliknij prawym przyciskiem komponent Wałek popychacza i kliknij Utrzymaj stopień swobody.
Wałek zachowa swoją charakterystykę ruchomą. Teraz należy upewnić się, że wałek styka się z krzywką.
- Kliknij polecenie Wstaw połączenie, aby wyświetlić okno dialogowe. Z listy wybierz Kontakt 2D.
- Wybierz krawędź profilu krzywki.
- Wybierz profil szkicu wyświetlany na komponencie wałka. Można użyć geometrii szkicu jako części symulacji.
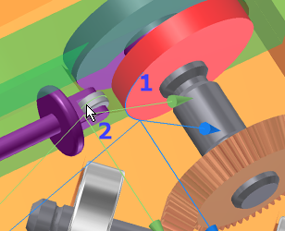
- Kliknij przycisk OK.
- Przeciągnij Popychacz, aż dojdzie do kontaktu z krzywką. Popychacz dotyka, lecz nie penetruje krzywki. Kontakt 2D utworzył mechaniczną relację między dwoma komponentami.
Zanim będziemy kontynuować, zmodyfikujemy właściwości kontaktu 2D i wyświetlimy wektor siły.
- W przeglądarce kliknij prawym przyciskiem myszy połączenie kontaktowe 2D, a następnie kliknij Właściwości.
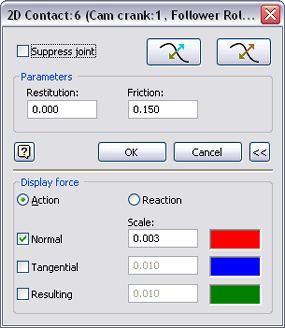
- Ustaw wartość Przywrócenie na 0.0, wartość Tarcie na 0.15.
- Rozwiń
 okno dialogowe, aby przejść do niższego przekroju. Zaznacz pole Normalny i ustaw Skalę na 0.003.
okno dialogowe, aby przejść do niższego przekroju. Zaznacz pole Normalny i ustaw Skalę na 0.003. - Kliknij przycisk OK.