Po utworzeniu zespołu i dodaniu co najmniej jednego połączenia standardowego można wstawić inne połączenia (toczne, przesuwne, kontaktowe 2D i łączące) pomiędzy dwoma komponentami, pomiędzy którymi istnieje co najmniej jeden stopień swobody. Połączenia te należy wstawić ręcznie, ponieważ w odróżnieniu od połączeń standardowych, nie można utworzyć ich automatycznie poprzez przekształcenie wiązania . Wszystkie połączenia w tych kategoriach wiążą co najmniej jeden stopień swobody, utworzony przez połączenia standardowe.
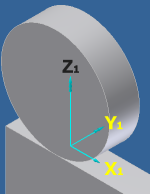 |
Połączenia toczne, podobnie jak połączenia przesuwne, mogą być używane do zamykania pętli kinematycznych i (oprócz połączeń stożkowych) działać jak komponenty w ruchu 2D względem siebie. Układy współrzędnych połączenia są umieszczane za pomocą oprogramowania w punkcie kontaktu. Ruch połączenia odbywa się w płaszczyźnie zdefiniowanej przez wektory Z 1 (normalny) i X 1 (styczny). Płaszczyzna kontaktu jest definiowana przez wektory X 1 i Y 1 . |
Połączenia toczne mogą być tworzone wyłącznie pomiędzy komponentami będącymi we względnym ruchu wobec siebie. Dlatego musi istnieć co najmniej jedno połączenie standardowe w mechanizmie zawierającym dwa komponenty połączenia tocznego. W przypadku połączeń tocznych stosowane jest trwałe wiązanie kontaktowe. Połączenia toczne mogą wykazywać dwa rodzaje zachowania, w zależności od opcji wybranej podczas tworzenia połączenia:
- Opcja toczenia zapewnia wyłącznie sprzężony obrót kół zębatych.
- Opcja toczenia i styczności zapewnia styk pomiędzy dwoma kołami zębatymi, jak również sprzężony obrót kół zębatych.
Połączenia toczne (Walec na płaszczyźnie, Walec na walcu, Walec w walcu) zapewniają dostęp do parametru Sprawność. Wartości od 0,001 do 1,0 reprezentują energię wyjściową przekazywaną z przekładni wejściowej do przekładni wyjściowej. Jeśli połączenie toczne jest tworzone automatycznie z przekładni walcowej programu Design Accelerator, parametr Sprawność jest ustawiany automatycznie i nie ma do niego dostępu. Parametr Sprawność znajduje się w polu Właściwości połączenia na karcie Parametry w sekcji Obciążenia.
Pierwsze kroki
Konstrukcja tych połączeń jest podobna, jak w przypadku połączeń przesuwnych.
- Otwórz zespół.
Wskazówki znajdujące się w rozdziale Przygotowywanie zespołów do symulacji dynamicznej zawierają informacje, w jaki sposób można modelować zespół w celu uproszczenia symulacji dynamicznej.
- Na wstążce kliknij
kartę Środowiska
 panel Początek
Symulacja dynamiczna
.
panel Początek
Symulacja dynamiczna
. - Na wstążce kliknij
kartę Symulacja dynamiczna
panel Połączenie
Wstaw połączenie
 .
. - W oknie dialogowym Wstaw połączenie kliknij strzałkę w dół znajdującą się w polu typu połączenia lub kliknij ikonę Wyświetl tabelę połączeń
 , aby wybrać typ połączenia.
, aby wybrać typ połączenia.
Następnie należy wykonać różne czynności w zależności od typu połączenia tocznego, które ma być dodane. Kliknij znajdujące się poniżej typy połączeń, aby zapoznać się z opisem czynności koniecznych do wstawienia połączenia określonego typu.
Toczne: walec na płaszczyźnie
W przypadku tych połączeń drugi komponent musi posiadać ruch płaski względem pierwszego komponentu.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: walec na płaszczyźnie.
- W oknie dialogowym Wstaw połączenie kliknij jedno wiązanie: toczne lub dwa wiązania: toczne i styczności.
Wybierz opcję wiązanie połączenia tocznego dla walca na płaszczyźnie, jeśli walec i płaszczyzna są już poprawnie umieszczone, a podczas całej symulacji jest zapewniona styczność. Walec i płaszczyzna są umieszczone poprawnie, jeśli oś Z walca oddalona jest o stałą wartość (równą promieniowi walca) od płaszczyzny.
Kryteria weryfikacji styczności są surowe. Upewnij się, że komponenty są styczne geometrycznie.
Wybierz opcję 2 wiązania połączenia tocznego dla walca na płaszczyźnie, aby narzucić i utrzymać styczność pomiędzy walcem i płaszczyzną. Wiązanie styczności generuje obciążenie normalne.
Ustawienie domyślne to dwa wiązania: toczne i styczności.
- W oknie graficznym określ płaszczyznę pierwszego komponentu (płaszczyzna X-Z układu współrzędnych).
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia płaszczyzny.
- Określ płaszczyznę X-Y wybierając płaszczyznę kontaktu.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk
 , a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
Układ współrzędnych połączenia dla pierwszego komponentu ma swój początek w punkcie połączenia płaszczyzny z walcem.
- Jeśli wybierzesz płaszczyznę jako pierwszy element, wybierz oś Z, aby zdefiniować normalną do płaszczyzny. Jeśli wybierzesz oś Z jako pierwszy element, wybierz oś X, aby zdefiniować płaszczyznę.
- Określ płaszczyznę X-Y wybierając płaszczyznę kontaktu.
- Określ układ współrzędnych połączenia walca.
- Wybierz walec.
- Wybierz początek układu współrzędnych połączenia.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie, kliknij opcję Zamień X/Z, aby zamienić kierunek osi X lub Z układu współrzędnych połączenia dla pierwszego komponentu.
- Kliknij przycisk OK.
Toczne: walec na walcu
W przypadku tych połączeń drugi komponent musi posiadać ruch płaski względem pierwszego komponentu.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: walec na walcu.
- W oknie dialogowym Wstaw połączenie kliknij jedno z wiązań: toczne lub dwa wiązania: toczne i styczności.
Wybierz opcję wiązanie połączenia tocznego dla walca na walcu, jeśli oba walce są już poprawnie umieszczone, a podczas całej symulacji jest zapewniony styk. Oba walce są umieszczone poprawnie, jeśli ich osie Z są od siebie oddalone o stałą wartość (równą sumie długości promieni obu walców).
Kryteria weryfikacji styczności są surowe. Upewnij się, że komponenty są styczne geometrycznie.
Wybierz opcję 2 wiązania połączenia tocznego dla walca na walcu, aby narzucić i utrzymać styczność pomiędzy dwoma walcami. Wiązanie styczności generuje obciążenie normalne.
Ustawienie domyślne to dwa wiązania: toczne i styczności.
- W oknie graficznym określ układ współrzędnych połączenia komponentu zawierającego pierwszy walec.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz pierwszy walec.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
Układ współrzędnych połączenia dla pierwszego komponentu ma swój początek w punkcie jego połączenia z drugim komponentem.
- Wybierz oś X.
- Wybierz pierwszy walec.
- Powtórz krok 3 dla komponentu zawierającego drugi walec.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie kliknij opcję Zamień X, aby zamienić kierunek osi X jednego z komponentów.
- Kliknij przycisk OK.
Jeśli wstawione zostanie połączenie z jednym wiązaniem, a walce nie będą się stykać, w programie zostanie wyświetlone ostrzeżenie, że odległość pomiędzy dwiema osiami nie równa się sumie promieni.
Jeśli wstawione zostanie połączenie z dwoma wiązaniami, a walce będą się stykać, oprogramowanie wyświetli ostrzeżenie, że mechanizm zawiera jeden stopień nadmiarowości.
Toczne: walec w walcu
W przypadku tych połączeń drugi komponent musi posiadać ruch płaski względem pierwszego komponentu.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: walec w walcu.
- W oknie dialogowym Wstaw połączenie kliknij jedno wiązanie: toczne lub dwa wiązania: toczne i styczności.
Wybierz opcję 1 wiązanie połączenia tocznego dla walca w walcu, jeśli oba walce są już poprawnie umieszczone, a podczas całej symulacji styk jest zapewniony. Oba walce są umieszczone poprawnie, jeśli oś Z walca wewnętrznego oddalona jest o stałą wartość (równą długości promienia walca wewnętrznego) od wewnętrznej powierzchni walca zewnętrznego.
Kryteria weryfikacji styczności są surowe. Upewnij się, że komponenty są styczne geometrycznie.
Wybierz opcję 2 wiązania połączenia tocznego dla walca w walcu, aby narzucić i utrzymać styczność pomiędzy dwoma walcami. Wiązanie styczności generuje obciążenie normalne.
Ustawienie domyślne to dwa wiązania: toczne i styczności.
- W oknie graficznym, określ układ współrzędnych połączenia komponentu zawierającego walec zewnętrzny.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz walec zewnętrzny.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
Układ współrzędnych połączenia dla pierwszego komponentu ma swój początek w punkcie jego połączenia z drugim komponentem.
- Wybierz oś X.
- Wybierz walec zewnętrzny.
- Powtórz czynność 3 dla komponentu zawierającego walec wewnętrzny.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie kliknij opcję Zamień X, aby zamienić kierunek osi X jednego z komponentów.
- Kliknij przycisk OK.
Jeśli wstawione zostanie połączenie z jednym wiązaniem, a walce nie będą się stykać, oprogramowanie wyświetli ostrzeżenie, że odległość pomiędzy dwiema osiami nie równa się sumie promieni.
Jeśli wstawione zostanie połączenie z dwoma wiązaniami, a walce są już styczne, ponieważ zapewnia to pozostała część łańcucha kinematycznego, oprogramowanie wyświetli ostrzeżenie, że mechanizm zawiera jeden stopień nadmiarowości.
Toczne: krzywa walca
W przypadku tych połączeń drugi komponent musi posiadać ruch płaski względem pierwszego komponentu.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: krzywa walca.
- W oknie graficznym określ układ współrzędnych połączenia komponentu zawierającego krzywą.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz powierzchnię krzywej, krawędź lub zamkniętą pętlę znajdującą się na szkicu.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz krawędź krzywej.
- Wybierz powierzchnię krzywej, krawędź lub zamkniętą pętlę znajdującą się na szkicu.
- W oknie graficznym określ układ współrzędnych połączenia komponentu zawierającego walec.
- Wybierz walec.
- Wybierz początek układu współrzędnych połączenia.
- Kliknij przycisk OK.
Pas
W przypadku tych połączeń osie obrotu dwóch komponentów muszą być położone równolegle. Oznacza to, że połączenie funkcjonuje pomiędzy dwoma kołami pasowymi, które znajdując się w tej samej płaszczyźnie. Połączenie pasowe może funkcjonować wyłącznie w przypadku, jeśli odległość pomiędzy środkami dwóch walców jest stała.
- Wybierz opcję Pas, która dostępna jest z menu typu połączenia lub z tabeli połączeń.
- W oknie dialogowym Wstaw połączenie wybierz opcję Pas prosty lub Pas skrzyżowany.
Domyślnie zaznaczona jest opcja Pas prosty.
- W oknie graficznym określ układ współrzędnych połączenia komponentu zawierającego pierwszy walec.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz pierwszy walec.
Osią walca musi być oś Z układu współrzędnych tego połączenia.
Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
Układ współrzędnych połączenia dla pierwszego komponentu ma swój początek w punkcie jego połączenia z drugim komponentem.
- Wybierz oś X.
- Wybierz pierwszy walec.
- Powtórz czynność 3 dla komponentu zawierającego drugi walec.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie kliknij opcję Zamień X, aby zamienić kierunek osi X.
- Kliknij przycisk OK.
Toczne: stożek na płaszczyźnie
W przypadku tego połączenia stożek musi być umieszczony stycznie do płaszczyzny. Aby utrzymać styczność podczas symulacji, użyj innych połączeń.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: stożek na płaszczyźnie.
- W oknie graficznym, wybierz płaszczyznę.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia płaszczyzny.
- Wybierz stożek.
Oprogramowanie automatycznie umieszcza dwa układy współrzędnych połączenia.
- Kliknij przycisk OK.
Toczne: stożek na stożku
W przypadku tego połączenia drugi stożek musi być umieszczony stycznie do pierwszego stożka. Aby utrzymać styczność podczas symulacji, użyj innych połączeń.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: stożek na stożku.
- W oknie graficznym wybierz pierwszy stożek.
Jeżeli wybrany komponent nie zawiera stożka, Symulacja dynamiczna automatycznie go utworzy, a jego podstawa i promień (R1) staną się wybranymi wartościami. Wierzchołek znajduje się na przecięciu osi Y układów współrzędnych dwóch komponentów.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz oś Y lub stożek.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
- Wybierz oś Y lub stożek.
- Wybierz oś Y układu współrzędnych połączenia komponentu, który zawiera drugi stożek.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie, kliknij opcję Zamień Y, aby zamienić kierunek osi Y.
- Kliknij przycisk OK.
Toczne: stożek w stożku
W przypadku tego połączenia stożek wewnętrzny musi być umieszczony stycznie do stożka zewnętrznego. Aby utrzymać styczność podczas symulacji, użyj innych połączeń.
- W menu typu połączenia lub w tabeli połączeń wybierz opcję Toczne: stożek w stożku.
- W oknie graficznym określ układ współrzędnych połączenia komponentu zawierającego stożek zewnętrzny.
Jeżeli wybrany komponent nie zawiera stożka, Symulacja dynamiczna automatycznie go utworzy, a jego podstawa i promień (R1) staną się wybranymi wartościami. Wierzchołek znajduje się na przecięciu osi Y układów współrzędnych pierwszego i drugiego komponentu.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz oś Y.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
- Wybierz oś Y.
- Wybierz oś Y układu współrzędnych połączenia dla stożka wewnętrznego.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie, kliknij opcję Zamień Y, aby zamienić kierunek osi Y.
- Kliknij przycisk OK.
Śruba
Podobnie, jak w przypadku innych połączeń tocznych, połączenia śrubowe funkcjonują pomiędzy komponentami, między którymi istnieją relatywne stopnie swobody. Połączenie śrubowe łączy obrotowy stopień swobody i równoległy stopień swobody. Domyślnie, podczas tworzenia połączenia, oprogramowanie tworzy połączenie walcowe, zapewniające dwa stopnie swobody pomiędzy dwoma komponentami przed utworzeniem połączenia śrubowego.
- Wybierz opcję Śruba, która dostępna jest z menu typu połączenia lub z tabeli połączeń.
- Kliknij opcję Utwórz połączenie walcowe dostępną w oknie dialogowym Wstaw połączenie, jeśli oprogramowanie ma najpierw utworzyć pomiędzy dwoma komponentami połączenie walcowe.
Przed wstawieniem połączenia śrubowego pomiędzy dwoma komponentami musi być połączenie walcowe.
- W oknie graficznym określ układ współrzędnych połączenia pierwszego komponentu.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz oś Z, czyli oś równoległego i obrotowego stopnia swobody.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
Układ współrzędnych połączenia dla pierwszego komponentu ma swój początek w punkcie jego połączenia z drugim komponentem.
- Wybierz oś X.
- Wybierz oś Z, czyli oś równoległego i obrotowego stopnia swobody.
- Powtórz czynność 3 dla drugiego komponentu.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie, kliknij opcję Zamień Z, aby zamienić kierunek osi Z lub opcję Zamień X, aby zamienić kierunek osi X.
- Podaj podział śruby.
- Kliknij przycisk OK.
Przekładnia ślimakowa
Podobnie jak w przypadku innych połączeń tocznych, połączenia przekładni ślimakowej funkcjonują pomiędzy komponentami, między którymi istnieją względne stopnie swobody. Połączenie przekładni ślimakowej łączy dwa obrotowe stopnie swobody, które ustawione są prostopadle względem siebie.
- Wybierz opcję Przekładnia ślimakowa, która dostępna jest z menu typu połączenia lub z tabeli połączeń.
- W oknie graficznym określ układ współrzędnych połączenia komponentu zawierającego przekładnię.
Układ współrzędnych połączenia dla komponentu nie musi być taki sam, jak układ współrzędnych komponentu.
Oprogramowanie przedstawia wyniki w układzie współrzędnych połączenia pierwszego komponentu.
- Wybierz oś Z.Wskazówka: Jeśli przy wskazywaniu elementu geometrii pojawiają się problemy, kliknij przycisk, a następnie wybierz komponent w oknie graficznym. Ułatwia to wybór elementu w komponencie.
Chociaż nie zawsze zachodzi potrzeba wyboru dodatkowych elementów geometrycznych określających układ współrzędnych połączenia, zaleca się, aby układ współrzędnych połączenia był określony tak precyzyjnie, jak to tylko możliwe.
- Wybierz początek układu współrzędnych połączenia.
Układ współrzędnych połączenia dla pierwszego komponentu ma swój początek w punkcie połączenia przekładni ze śrubą.
- Wybierz oś X.
- Wybierz oś Z.
- Określ układ współrzędnych połączenia dla komponentu zawierającego śrubę.
- Wybierz oś Z.
- Wybierz początek układu współrzędnych połączenia.
- Wybierz oś X.
- Jeśli to konieczne, w oknie dialogowym Wstaw połączenie, kliknij opcję Zamień Z, aby zamienić kierunek osi Z lub opcję Zamień X, aby zamienić kierunek osi X.
- Podaj podział śruby.
- Kliknij przycisk OK.
 Pokaż, w jaki sposób utworzyć połączenie toczne walcowe
Pokaż, w jaki sposób utworzyć połączenie toczne walcowe