Após criar a montagem e de adicionar uma ou várias juntas padrão, é possível inserir outras juntas (giratórias, deslizantes, de contato 2D e de força) entre dois componentes que tenham um ou mais graus de liberdade entre si. Estas juntas devem ser inseridas manualmente; ao contrário das juntas padrões, outras juntas não podem ser criadas automaticamente usando a conversão de restrições . As juntas destas categorias restringem um ou vários dos graus de liberdade criados por juntas padrões.
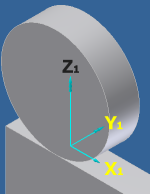 |
As juntas giratórias, como as deslizantes, podem fechar contornos cinemáticos e, com excessão das juntas cônicas, isto funciona para componentes com movimento 2D relativos entre si. O software coloca os sistemas de coordenadas de juntas no ponto de contato. O movimento da junta é produzido no plano definido pelos vetores Z 1 (normal) e X 1 (tangente). O plano de contato está definido pelos vetores X 1 e Y 1 . |
As juntas giratórias só podem ser criadas entre componentes que têm movimento relativo entre si. Portanto, deve ter ao menos uma junta padrão no mecanismo que contenha os dois componentes de uma junta giratória. As juntas giratórias aplicam uma restrição de contato permanente. As juntas giratórias podem ter dois comportamentos diferentes, dependendo da opção escolhida durante a criação da junta:
- A opção de giro só garante a rotação acoplada das engrenagens.
- As opções de giro e tangencial garantem a tangência entre as duas engrenagens, assim como a rotação acoplada das engrenagens.
As juntas giratórias, Cilindro sobre Plano e Cilindro sobre Cilindro e Cilindro em Cilindro, proporcionam acesso ao parâmetro Eficiência. Os valores entre 0,001 e 1,0 representam a saída de energia da engrenagem de entrada à engranagem de saída. Se a junta giratória for criada automaticamente de um gerador de engrenagens retas do Design Accelerator, o parâmetro Eficiência será estabelecido automaticamente e seu acesso bloqueado. O parâmetro Eficiência está localizado na guia Parâmetros das propriedades da junta, na seção Cargas.
Passos preliminares
A construção destas juntas é similar à das juntas deslizantes.
- Abra uma montagem.
As dicas incluídas em Preparar montagens para simulação dinâmica ensina como modelar uma montagem para facilitar a simulaçã dinâmica.
- Na faixa de opções, clique na
guia Ambientes
 painel Iniciar
Simulação dinâmica
.
painel Iniciar
Simulação dinâmica
. - Na faixa de opções, clique na
guia Simulação dinâmica
painel Junta
Inserir Junta
 .
. - Na caixa de diálogo Inserir junta, clique na seta abaixo situada junto à caixa de tipo de junta ou clique no ícone Exibir tabela de juntas
 para selecionar o tipo de junta.
para selecionar o tipo de junta.
O resto de passos variam de acordo com o tipo de junta giratória que esteja sendo adicionada. Clique nos tipos de junta abaixo para ver os passos necessários para inserir uma junta determinada.
Girando: Cilindro sobre Plano
Nestas juntas, o segundo componente deve ter um movimento plano relativo ao primeiro componente.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Cilindro sobre Plano.
- Na caixa de diálogo Inserir junta, clique em qualquer restrição: giratória ou em duas restrições: giratória e tangente.
Insira uma junta giratória de cilindro sobre plano de uma restrição quando o cilindro e o plano já estiverem corretamente posicionados e a tangência estiver garantida durante toda a simulação. O cilindro e o plano estarão corretamente posicionados quando o eixo Z do cilindro estiver a uma distância fixa (o raio do cilindro) do plano.
Os critérios de verificação de tangência são rígidos. Assegure-se de que os componentes sejam geometricamente tangentes.
Insira juntas giratórias de cilindro sobre plano de duas restrições para forçar e manter a tangência entre o cilindro e o plano. A restrição de tangência gera uma carga normal.
O valor padrão são duas restrições: giratória e tangente.
- Na janela de desenho, especifique o plano do primeiro componente (o plano X-Z do sistema de coordenadas).
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do plano.
- Especifique o plano X-Y selecionando o plano de contato.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique
 e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
O sistema de coordenadas de juntas do componente um tem sua origem no ponto no qual o plano está associado ao cilindro.
- Se selecionar o plano como entidade um, selecione o eixo Z para definir a normal ao plano. Se selecionar o eixo Z como entidade um, selecione o eixo X para definir o plano.
- Especifique o plano X-Y selecionando o plano de contato.
- Especifique o sistema de coordenadas de juntas do cilindro.
- Selecione o cilindro.
- Selecione a origem do sistema de coordenadas de juntas.
- Se necessário, na caixa diálogo Inserir junta, clique em Alternar X/Z para mudar a direção do eixo X ou do Z do sistema de coordenadas de junta para o primeiro compenente
- Clique em OK.
Girando: Cilindro sobre Cilindro
Nestas juntas, o segundo componente deve ter um movimento plano relativo ao primeiro componente.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Cilindro sobre Cilindro.
- Na caixa de diálogo Inserir junta, clique em qualquer restrição: giratória ou em duas restrições: giratória e tangente.
Insira uma junta giratória de cilindro sobre cilindro de uma restrição quando os dois cilindros estiverem corretamente posicionados e a tangência estiver garantida durante toda a simulação. Os dois cilindros estarão corretamente localizados quando os eixos Z dos dois cilindros estiverem a uma distância fixa um do outro (a soma dos raios dos dois cilindros).
Os critérios de verificação de tangência são rígidos. Assegure-se de que os componentes sejam geometricamente tangentes.
Insira duas juntas giratórias de cilindro sobre cilindro de duas restrições para forçar e manter a tangência entre os dois cilindros. A restrição de tangência gera uma carga normal.
O valor padrão são duas restrições: de giro e de tangência.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém o cilindro um.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o primeiro cilindro.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
O sistema de coordenadas de juntas do componente um tem sua origem no ponto no qual este componente está associado ao segundo componente.
- Selecione o eixo X.
- Selecione o primeiro cilindro.
- Repita o passo 3 para o componente que contém o segundo cilindro.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar X para mudar a direção do eixo X de um dos dois componentes.
- Clique em OK.
Quando é inserida uma junta de uma restrição e os cilindros não são tangentes, o software lhe avisa de que a distância entre os dois eixos não é igual à soma dos raios.
Quando é inserida uma junta de duas restrições e os cilindros são tangentes, o software avisa de que o mecanismo tem um grau de redundância.
Girando: Cilindro em Cilindro
Nestas juntas, o segundo componente deve ter um movimento plano relativo ao primeiro componente.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Cilindro em Cilindro.
- Na caixa de diálogo Inserir junta, clique em qualquer restrição: giratória ou em duas restrições: giratória e tangente.
Insira juntas giratórias de cilindro em cilindro de uma restrição quando os dois cilindros estiverem corretamente posicionados e a tangência estiver garantida durante toda a simulação. Os dois cilindros estarão corretamente localizados quando o eixo Z do cilindro interno estiver a uma distância fixa (o raio do cilindro interno) da superfície interna do cilindro externo.
Os critérios de verificação de tangência são rigorosos. Assegure-se de que os componentes sejam geometricamente tangentes.
Insira duas juntas giratórias de cilindro sobre cilindro de duas restrições para forçar e manter a tangência entre os dois cilindros. A restrição de tangência gera uma carga normal.
O valor padrão são duas restrições: de giro e de tangência.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém o cilindro exterior.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o cilindro externo.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
O sistema de coordenadas de juntas do primeiro componente tem sua origem no ponto no qual este componente está associado ao segundo componente.
- Selecione o eixo X.
- Selecione o cilindro externo.
- Repita o passo 3 para o componente que contém o cilindro interno.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar X para mudar a direção do eixo X de um dos dois componentes.
- Clique em OK.
Quando é inserida uma junta de uma restrição e os cilindros não são tangentes, o software lhe avisa de que a distância entre os dois eixos não é igual à soma dos raios.
Quando é inserida uma junta de duas restrições e os cilindros já são tangentes porque o resto da cadeia cinemática o garante, o software avisa de que o mecanismo tem um grau de redundância.
Girando: Curva de cilindro
Nestas juntas, o segundo componente deve ter um movimento plano relativo ao primeiro componente.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Curva de cilindro.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém a curva.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione uma face curva, uma aresta ou um contorno fechado num esboço.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este sistema da forma mais precisa possível.
- Selecione a aresta da curva.
- Selecione uma face curva, uma aresta ou um contorno fechado num esboço.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém o cilindro.
- Selecione o cilindro.
- Selecione a origem do sistema de coordenadas de juntas.
- Clique em OK.
Correia
Nestas juntas, os eixos rotacionais dos dois componentes devem ser paralelos. A junta de correia só funciona se a distância entre os centros dos dois cilindros for fixa.
- No menu de tipo de junta ou na tabela de juntas, selecione Correia.
- Na caixa de diálogo Inserir junta, clique em Correia reta ou Correia cruzada.
A opção padrão é Correia reta.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém o cilindro um.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o cilindro um.
O eixo do cilindro deve ser o eixo Z do sistema de coordenadas de juntas.
Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
O sistema de coordenadas de juntas do primeiro componente tem sua origem no ponto no qual este componente está associado ao segundo componente.
- Selecione o eixo X.
- Selecione o cilindro um.
- Repita o passo 3 para o componente que contém o cilindro dois.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar X para mudar a direção do eixo X.
- Clique em OK.
Girando: Cone sobre Plano
Nesta junta, o cone deve ser tangente ao plano. Utilize outras juntas para manter a tangência durante a simulação.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Cone sobre Plano.
- Na janela de desenho, selecione o plano.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil selecionar uma entidade no componente.
O software expressa os resultados no sistema de coordenadas de juntas do plano.
- Selecione o cone.
O software insere automaticamente os dois sistemas de coordenadas de juntas.
- Clique em OK.
Girando: Cone sobre Cone
Nesta junta, o segundo cone deve ser tangente ao primeiro cone. Utilize outras juntas para manter a tangência durante a simulação.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Cone sobre Cone.
- Na janela de desenho, selecione o primeiro cone.
Se o componente selecionado não contém um cone, a simulação dinâmica gera um cuja base e raio (R1) se tornam as seleções. O vértice está localizado na interseção dos eixos Y do sistema de coordenadas dos dois componentes.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o eixo Y ou um cone.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
- Selecione o eixo Y ou um cone.
- Selecione o eixo Y do sistema de coordenadas de juntas do componente que contém o segundo cone.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar Y para mudar a direção do eixo Y.
- Clique em OK.
Girando: Cone em Cone
Nesta junta, o cone interior deve ser tangente ao cone exterior. Utilize outras juntas para manter a tangência durante a simulação.
- No menu de tipo de junta ou na tabela de juntas, selecione de Giro: Cone em Cone.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém o cone exterior.
Se o componente selecionado não contém um cone, a simulação dinâmica gera um cuja base e raio (R1) se tornam as seleções. O vértice está localizado na interseção dos eixos Y do sistema de coordenadas dos componentes um e dois.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o eixo Y.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
- Selecione o eixo Y.
- Selecione o eixo Y do sistema de coordenadas de juntas para o cone interior.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar Y para mudar a direção do eixo Y.
- Clique em OK.
Parafuso
Como outras juntas giratórias, as juntas de parafusos funcionam entre componentes que já têm graus de liberdade relativos entre eles. A junta de parafuso acopla um grau de liberdade de rotação e outro de translação. Por padrão, durante a criação de uma junta, o software cria uma junta cilíndrica para proporcionar os dois graus de liberdade entre os dois componentes antes de criar a junta de parafuso.
- No menu de tipo de junta ou na tabela de juntas, selecione Parafuso.
- Na caixa de diálogo Inserir junta, clique em Criar junta cilíndrica se desejar que o software crie primeiro uma junta cilíndrica entre os dois componentes.
Deve existir uma junta cilíndrica entre os dois componentes antes de inserir uma junta de parafuso.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do primeiro componente.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o eixo Z, isto é, o eixo dos graus de liberdade de translação e rotação.Dica: Se encontra dificuldades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este sistema da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
O sistema coordenado de junta para o primeiro componente é originado no ponto em que o componente é ligado ao segundo componente.
- Selecione o eixo X.
- Selecione o eixo Z, isto é, o eixo dos graus de liberdade de translação e rotação.
- Repita o passo 3 para o segundo componente.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar Z para mudar a direção do eixo Z ou em Alternar X para mudar a direção do eixo X.
- Insira a folga do parafuso.
- Clique em OK.
Engrenagem sem-fim
Como outras juntas giratórias, a engrenagem sem-fim funciona entre componentes que já têm graus de liberdade relativos entre eles. A junta de engrenagem sem-fim acopla dois graus de liberdade rotacionais que são perpendiculares entre eles.
- No menu de tipo de junta ou na tabela de juntas, selecione Engrenagem sem-fim.
- Na janela de desenho, especifique o sistema de coordenadas de juntas do componente que contém a engrenagem.
O sistema de coordenadas de juntas de um componente pode não ser igual ao sistema de coordenadas de componentes.
O software expressa os resultados no sistema de coordenadas de juntas do primeiro componente.
- Selecione o eixo Z.Dica: Se encontra dificuladades ao selecionar uma entidade geométrica, clique e a seguir, selecione o componente na janela de desenho. Esta função torna mais fácil a seleção de uma entidade no componente.
Ainda que não seja necessário sempre selecionar entidades geométricas adicionais para especificar o sistema de coordenadas de juntas, é conveniente detalhar este da forma mais precisa possível.
- Selecione a origem do sistema de coordenadas de juntas.
O sistema de coordenadas de juntas do primeiro componente tem sua origem no ponto no qual a engrenagem está associada ao parafuso.
- Selecione o eixo X.
- Selecione o eixo Z.
- Especifique o sistema de coordenadas de juntas do componente que contém o parafuso.
- Selecione o eixo Z.
- Selecione a origem do sistema de coordenadas de juntas.
- Selecione o eixo X.
- Se necessário, na caixa de diálogo Inserir junta, clique em Alternar Z para mudar a direção do eixo Z ou em Alternar X para mudar a direção do eixo X.
- Insira a folga do parafuso.
- Clique em OK.
 Mostrar-me como é criada uma união de cilindro giratório
Mostrar-me como é criada uma união de cilindro giratório