Wenn Sie mit Motion Capture-Daten arbeiten, Punktwolkendaten in 3ds Max importieren und dann die Bewegung auf ein CAT-Rig übertragen wollen, wird Ihnen dieses Kapitel helfen. Es handelt sich weniger um einen Lehrgang als ein Problemlösungsbeispiel.
Dies ist eine Übung für die Konfiguration von Beschränkungen zur Lösung eines komplexen inhärenten Problems. Beschränkungen haben eine Richtung. In anderen Worten: Wenn A auf B beschränkt ist, dann kann B nicht A referenzieren. Da Beschränkungen keine zirkulären Beziehungen unterstützen, müssen wir das Problem durch Einsatz von Layern umgehen.
Das gewünschte Ergebnis ist ein Satz von Bones mit korrekt animierten Gelenkpositionen und -rotationen. Eine gute Möglichkeit zur Lösung dieses Problems ist die Zerlegung in zwei einfachere Probleme – Position und Rotation –, die dann getrennt behandelt werden. Die Position eines Bones hängt weder von anderen Bones im Skelett noch der Rotation irgendwelcher anderer Bones ab.
CAT vereinfacht die Lösung zu diesem Problem.
- Mit dem Hilfsmittel "Animation erfassen" können die Elemente des CAT-Rigs leicht dem Bones-Rig zugeordnet werden. Jeder Bone kann Versätze enthalten, mit deren Hilfe Sie die Stellung des CAT-Rigs während des Zuordnens der Bewegungen interaktiv anpassen können.
- Dank der prozeduralen Wirbelsäule ist es unnötig, jeden Bone der Wirbelsäule einzustellen. Die prozedurale Wirbelsäule von CAT kann anhand von Positions- und Ausrichtungsdaten für Becken, Brustkorb und Kopf die Wirbel mit hoher Genauigkeit interpolieren.
- Mit dem IK-System von CAT können Sie CAT-Rig-Bones auf das importierte Rig beschränken und die IK-Lösung der Software überlassen. Die Retargeting-Funktion ermöglicht es, die Stellung des CAT-Rigs selbst dann den Daten anzupassen, wenn die Beine der Figur beim Gehen sehr gerade sind und das CAT-Rig Beine besitzt, die länger oder kürzer als die ursprünglichen sind.
Beispielszene
Die folgenden Abbildungen veranschaulichen, wie die Elemente eines CAT-Rigs importierten Punktwolkendaten zugeordnet werden.
Punktwolke

Die ursprüngliche Motion-Capture-Datenwolke
Gelenkpositionen

Der erste Layer dient der Erzeugung von Gelenkpositionen mithilfe von Punktbeschränkungen. Bei den Gelenkpositionen handelt es sich einfach um gewichtete Positionsbeschränkungen, die folglich ohne großen Aufwand konfiguriert werden können. Die roten Kreuze in der Szenendatei stellen einfache Gelenkpositionshelfer dar.
Eine Gruppe von drei Punkthelfern wird zur Festlegung der Beckenausrichtung anhand der umgebenden Markierungen verwendet. Eine identische Konfiguration wird zur Steuerung der Ausrichtung des Brustkorbs und des Kopfs benutzt. Dies sind die blauen Punkte in der Abbildung.
Quader-Rig
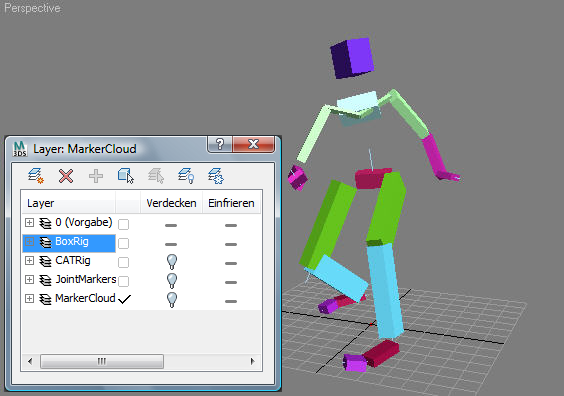
Der zweite Layer ist das Quader-Rig, durch das die Gelenkwinkel definiert werden. Die Quader sind durch die Gelenkpositionen beschränkt, und die LookAt-Controller bestimmen die Rotationen. Beachten Sie, dass die genaue Position vieler dieser Bones nicht wichtig ist. Die Kniegelenke bewegen sich zum Beispiel relativ zum Hüftknochen, wenn aber die Daten auf das CAT-Rig übertragen werden, eliminiert dessen IK-System im Ergebnis die Bewegung und sperrt die Gelenkpositionen.
CAT-Rig
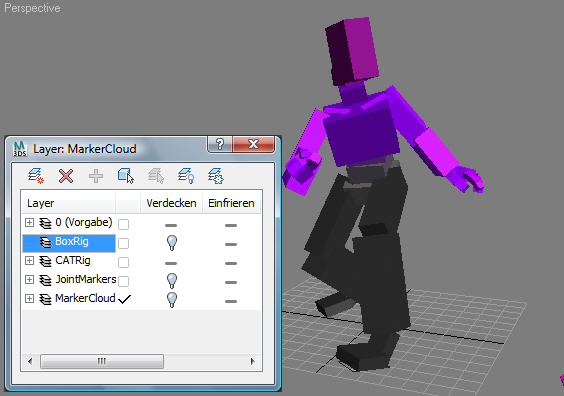
Die Elemente des CAT-Rigs wurden mit dem Hilfsmittel "Animation erfassen" dem Quader-Rig zugeordnet.