Use the controls in these group boxes to bind objects in a HD IK chain to the world or to follow objects. Use the various options to modify the behavior of the bindings.
-
Make a selection with an HD Solver applied. >
 Hierarchy panel > IK > Object Parameters rollout > Position/Orientation/Bind to Follow Object groups
Hierarchy panel > IK > Object Parameters rollout > Position/Orientation/Bind to Follow Object groups
Use weighted and axis-specific binding controls to create different weights for each binding, and to specify which axes the bound follow object influences. Use the R (Relative) buttons to establish a relative offset with Bind Position and Bind Orientation.
Binding an Object to the World
Binds an object to the world if you want the object to hold its position and orientation as long as possible during IK operations.
Binding an Object to a Follow Object
Binds a selected object in your IK chain to any other object that is not a descendant of the selected object. This other object is called the follow object.
Procedures
To bind an object to the world:
-
 Select the object to be bound.
Select the object to be bound. - On the Hierarchy panel, click IK and expand the Object Parameters rollout.
- Select one or both of the Bind boxes:
- Turn on Bind Position to cause the object to attempt to maintain its current location.
- Turn on Bind Orientation to cause the object to attempt to maintain its current orientation.
To bind an object to a follow object:
- Turn on Bind and select the object in a kinematic chain to be bound.
Moving your mouse over an acceptable target will change the cursor to a push-pin icon.
- Drag to the follow object and release.
- Turn on Bind Orientation if you want the bound object to match the rotation of the follow object. Bind Position is automatically selected.
Turn off an axis (Axis: XYZ). The specified axis is no longer influenced by the follow object or the New IK Position end effector.
Use Weight to set the relative influence of multiple follow objects or end effectors, and thus their priority in solving the IK solution. The higher the relative Weight value, the higher the priority.
Note: As you drag, a dotted line is drawn from the pivot point of the selected object to the cursor. When the cursor is over a valid follow object, it changes to a push-pin cursor. Release to set the follow object. The name of the follow object will appear in the text area.
To unbind an object:
- Select the object to unbind, and then click Unbind.
In the text area, the name of the follow object is replaced with the word "None."
Interface
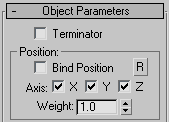
- Terminator
- Turn on to make the selected object terminate the IK chain. See Terminating Chains (HD Solver).
Position group
- Bind Position
- Binds the selected object in the IK chain to the world (attempts to maintain its location), or to a follow object, if one has been assigned. If a follow object has been assigned, then the translation of the follow object affects the IK solution. Note: This checkbox has no effect on the HD IK Solver Position end effectors, which are always bound to their assigned joints.
- Axis X/Y/Z
-
If one of the axes is turned off, the specified axis is no longer influenced by the follow object or the HD IK Solver Position end effector.
For example, if you turn off the X axis in the Position group, movement of the follow object (or end effector) along the X axis has no effect on the IK solution, but movement along the Y or Z axis has.
Note: These do not constrain the movement of the follow object or end effector. - Weight
-
Sets the influence of the follow object (or end effector) on its assigned object, and on the rest of the chain. A setting of 0 turns off the binding. Using this value you can set the relative influence of multiple follow objects or end effectors and their priority in solving the IK solution. The higher the relative Weight value, the higher the priority.
The Weight settings are relative; there's no point in using them if there's only one follow object or end effector in your IK hierarchy.
However, if you have a single HD IK chain with both Position and Rotation end effectors on a single joint, you can give them different weights to give priority to either the position or rotation solution.
You can adjust the Weight for multiple joints. Select two or more objects in the hierarchy, and the Weight value represents the commonality of the selection set.
Note: Differences in the Weight values have an effect only when there is no solution that satisfies two or more opposing end effectors in the chain. In this case, the end effector with the greatest weight "wins."
Orientation group
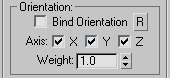
- Bind Orientation
-
Binds the selected object in the hierarchy to the world (attempts to maintain its orientation), or to a follow object, if one has been assigned. If a follow object has been assigned, then the rotation of the follow object affects the IK solution.
Note: This checkbox has no effect on the HD IK Solver Rotation end effectors, which are always bound to their assigned joints. - R
-
Establishes a relative position offset or rotation offset between follow object and end effector.
This button has no effect on the HD IK Solver Position end effectors. They are created on top of the joint to which they're assigned, and are automatically absolute.
If you move the joint away from the end effector, and want to reset the end effector to an absolute position, you can delete and then recreate the end effector.
- Axis X/Y/Z
-
If one of the axes is turned off, the specified axis is no longer influenced by the follow object or the HD IK Solver Position end effector.
For example, if you turn off the X axis in the Orientation group, rotation of the follow object (or end effector) in the X axis has no effect on the IK solution, but movement along the Y or Z axis has.
Note: These do not constrain the movement of the follow object or end effector. - Weight
-
Sets the influence of the follow object (or end effector) on its assigned object, and on the rest of the chain. A setting of 0 turns off the binding. Using this value you can set the relative influence of multiple follow objects or end effectors and their priority in solving the IK solution. The higher the relative Weight value, the higher the priority.
The Weight settings are relative; there's no point in using them if there's only one follow object or end effector in your IK hierarchy.
However, if you have a single HD IK chain with both Position and Rotation end effectors on a single joint, you can give them different weights to give priority to either the position or rotation solution.
You can adjust the Weight for multiple joints. Select two or more objects in the hierarchy, and the Weight value represents the commonality of the selection set.
Note: Differences in the Weight values have an effect only when there is no solution that satisfies two or more opposing end effectors in the chain. In this case, the end effector with the greatest weight "wins."
Bind To Follow Object group
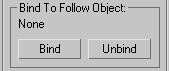
Controls to bind and unbind an object in an inverse kinematic chain to a follow object.
- [label]
- Displays the name of the selected follow object. Displays the word "None" if no follow object is set.
- Bind
- Binds an object in an inverse kinematic chain to a follow object.
- Unbind
- Unbinds the selected object in a HD IK chain from its follow object.