Una delle fasi di un processo di progettazione affidabile è rappresentato dalla convalida. Per convalidare un progetto è spesso consigliabile utilizzare alcuni casi teorici semplici e affidabili con cui eseguire il confronto. Di seguito sono riportati alcuni di questi casi.
Nei casi seguenti vengono descritte le equazioni e i presupposti utilizzati per ottenere la convalida dell'output di una simulazione.
Spostamento, caso massa-molla
Si tratta di un semplice caso di convalida di massa e molla.
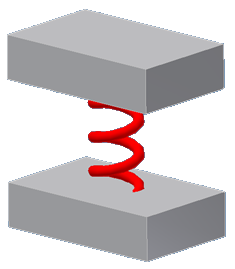
Legge di Newton:
![]() (1)
(1)
Con:
| Valore numerico: | |
|---|---|
| |
|
| |
|
| |
|
| |
10 |
| |
20 |
| |
15000 |
| |
0.3 |
| |
9.81 |
| |
0.33 |
| |
0.0 |
|
(1) |
|
|
con |
|
|
|
|
|
Una soluzione per questa equazione differenziale è la seguente: |
|
|
|
|
|
Una soluzione specifica, quando il sistema si è stabilizzato, è per |
|
|
Quindi (2) |
|
|
|
|
|
|
|
|
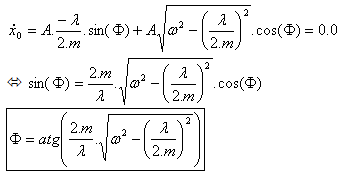
Le condizioni iniziali forniscono il valore di A e |
|
|
per t = 0,0, (3) |
|
|
|
|
|
e i |
|
|
|
|
|
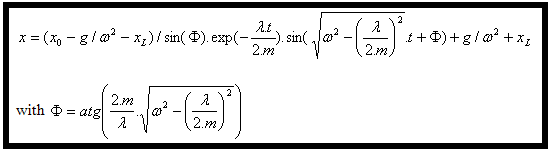
Al termine, (4) e (6) riportati in (3) forniscono l'equazione dello spostamento: |
|
|
|
|
|
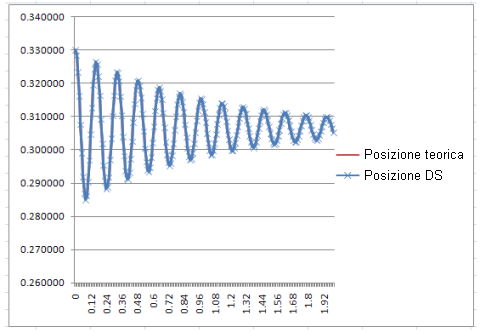
Questa equazione è stata quindi programmata in Excel e i risultati, confrontati con quelli prodotti da Simulazione dinamica, sono stati identici. |
|
 |
|
 (3)
(3) (5)
(5)
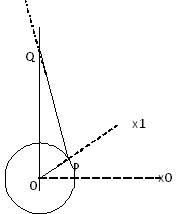
Posizione e velocità, caso pistone-manovella
Lo scopo di questo caso di convalida è quello di verificare la posizione e la velocità di un meccanismo costituito da un pistone e un albero a gomito quando l'output della simulazione dinamica e le equazioni teoriche indicano lo stesso risultato.
Valori noti: la "corsa" o la distanza del perno di banco dell'albero a gomito dal suo centro di rotazione e la lunghezza della biella compresa tra il perno di banco del cuscinetto principale e la connessione a spina del pistone.
Diagramma
|
Definizione |
R = length(OP) = corsa dell'albero a gomito L = length(PQ) = lunghezza della biella |
 |
|
|
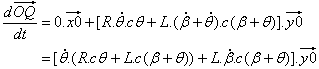
Velocità del punto Q in relazione al sistema di coordinate assoluto R0 = (x0, y0) |
|
|
|
// posizione di Q in R0 |
|
|
// velocità di Q in R0 |
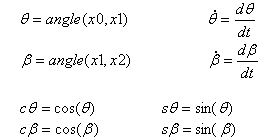
| con:
|
|
| e:
|
|
|
|
|
| con: |
|
| e; |
|
| quindi: |
|
|
Il punto Q si trova sull'asse y0 e il componente x0 è 0,0: |
|
|
|
|
 |
|
| Infine, utilizzando (1): | |
|
|
|
|
L'equazione (1) fornisce |
|
|
(1) |
|
e 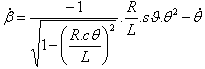 |
|
| Utilizzando MS Excel e i valori numerici (L=0,125m, R=0,06m e |
|
|
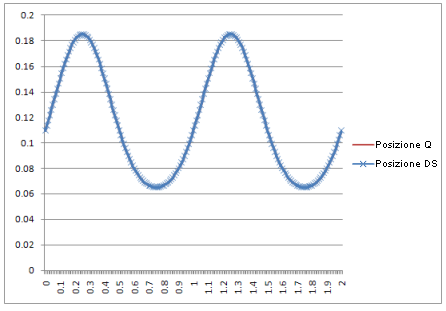
Posizione: |
|
 |
|
|
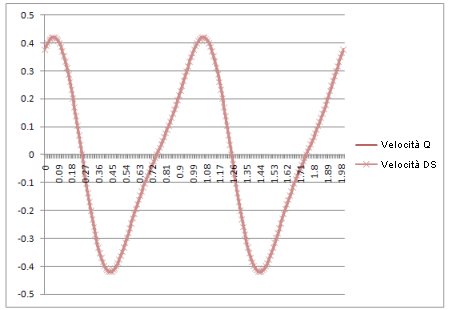
Velocità: |
|
 |
|
Risultato: le curve nella simulazione dinamica sono identiche a quelle prodotte dalle equazioni teoriche.