アクティブ リジッド ボディを作成します。
ソフト/リジッド ボディ > アクティブ リジッド ボディの作成(Soft/Rigid Bodies > Create Active Rigid Body) > 
アクティブ リジッド ボディを作成するときのオプションを設定します。オプションは次のとおりです。
- リジッド ボディ名(Rigid Body Name)
-
リジッド ボディの名前を指定します。この名前は、リジッド ボディを識別するために使用されます。
- アクティブ(Active)
-
リジッド ボディをアクティブ リジッド ボディにします。オフに設定した場合は、パッシブ リジッド ボディが作成されます。
- パーティクル衝突(Particle Collision)
-
パーティクルがサーフェスに衝突するように設定していてそのサーフェスがアクティブ リジッド ボディである場合、パーティクル衝突(Particle Collision)をオンまたはオフに設定することにより、リジッド ボディがパーティクルの衝突の力に反応するかどうかを設定することができます。
- 接続解除の許可(Allow Disconnection)
-
既定では、リジッド ボディからダイナミック アニメーションを処理するリジッド ボディ ソルバへの接続を解除することはできません。接続解除の許可(Allow Disconnection)をオンに設定すると、この接続を解除することができます。詳細については、リジッド ボディの接続を削除する時に出力される警告を参照してください。アトリビュート エディタでのみ使用可能です。
- 質量(Mass)
-
アクティブ リジッド ボディの質量を設定します。この値を大きくするほど、衝突するオブジェクトへのインフルエンスが大きくなります。パッシブ リジッド ボディの場合、質量アトリビュートは無視されます。
注:リジッド オプション(Rigid Options)ウィンドウには、重心の設定(Set Center of Mass)、初期位置の設定(Set Initial Position)、および初期速度の設定(Set Initial Velocity)のチェック ボックスがあります。これらのチェック ボックスは、重心(Center of Mass)、初期位置(Initial Position)、および初期速度(Initial Velocity)で X、Y、および Z の設定を有効(または無効)にするためのものです。重心の設定(Set Center of Mass)は、アクティブ リジッド ボディに対してだけ適用されます。
- 重心 X、Y、Z (Center of Mass X, Y, Z)
-
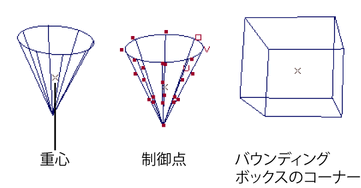
ローカル空間座標におけるアクティブ リジッド ボディの重心(Center of Mass)の位置を指定します。重心は、X 印のアイコンによって示されます。重心は、ワイヤフレーム モードで最も簡単に確認することができます。
重心は、アクティブ リジッド ボディのバウンドに影響します。たとえば、球の重心を下にずらして球のサーフェスに配置したとします。重力を使用してその球をパッシブ リジッド ボディに衝突させた場合、バウンドした後にその球は重心を中心に揺れます。
また、後述する初期スピン(Initial Spin)を設定した場合、重心はアクティブ リジッド ボディが回転する際の中心のポイントとなります。たとえば、アクティブ リジッド ボディの球内に重心を設定した場合、リジッド ボディはそのポイントを中心として回転します。重心を球の外に設定した場合、リジッド ボディはそのポイントを中心としてその周囲を回転します。
既定では、ポリゴン オブジェクトの重心は、そのバウンディング ボックスの重心です。NURBS オブジェクトの場合、既定の重心は重心からわずかにそれることがあります。
重心は、パッシブ リジッド ボディのダイナミクスの計算には使用されません。
- 重心をロック(Lock Center of Mass)
-
既定では、モデリング中にオブジェクトのサーフェスを変更すると、リジッド ボディの重心が再計算されます。このアトリビュートをオンに設定した場合、重心は変更されません。アトリビュート エディタでのみ使用可能です。
- 静止摩擦(Static Friction)
-
他のリジッド ボディに接触して静止している状態からリジッド ボディが動き出すまでの抵抗力を設定します。たとえば、傾斜している平面にボールを置いている場合、静止摩擦(Static Friction)は、ボールが平面を滑り落ち始めるか転がり始めるまでの抵抗力を設定します。オブジェクトが動きだした後は、静止摩擦はほとんどまたは全く影響を与えません。
この値を 0 に設定すると、リジッド ボディは自由に運動します。この値を 1 に設定すると、リジッド ボディの運動は制限されます。
- 動摩擦(Dynamic Friction)
-
別のリジッド ボディのサーフェス上を移動するリジッド ボディの抵抗力を設定します。
この値を 0 に設定すると、リジッド ボディは自由に運動します。この値を 1 に設定すると、リジッド ボディの運動は制限されます。
ヒント:2 つのリジッド ボディが接触している場合、それぞれの静止摩擦(Static Friction)と動摩擦(Dynamic Friction)がモーションに影響します。接触しているリジッド ボディの滑りおよび転がりを調整する場合は、静止摩擦(Static Friction)および動摩擦(Dynamic Friction)にいろいろな値を試してみてください。たとえば、濡れた氷の上を滑るホッケーのパックをシミュレートする場合、パックと氷の両方で動摩擦(Dynamic Friction)を 0 に近い値に設定する必要があります。
- 弾み(Bounciness)
-
リジッド ボディの弾性を設定します。
- ダンピング(Damping)
-
リジッド ボディの動きに対抗する力を設定します。このアトリビュートはドラッグと似ていて、他のオブジェクトとの接触前、接触中、および接触後にオブジェクトの動きに作用します。正の値を設定すると、動きが小さくなります。負の値を設定すると、動きは大きくなります。
- インパルス X、Y、Z (Impulse X, Y, Z)
-
インパルス X、Y、Z (Impulse X, Y, Z)で指定されるローカル空間位置にあるリジッド ボディの上に、マグニチュードと方向を持つ瞬間的なフォースを作成します。この値を大きくするほど、回転フォースも大きくなります。詳細については、リジッド ボディへインパルス(衝撃)をキー設定を参照してください。
- インパルス位置 X、Y、Z (Impulse Position X, Y, Z)
-
リジッド ボディのローカル空間内の、衝撃を加える位置を指定します。重心以外の場所に衝撃が加えられると、リジッド ボディはその重心を中心に、速度の変化に従って移動しながら回転します。
オブジェクトのサーフェス境界の外の位置を指定した場合も、オブジェクトには回転運動と速度があります。オブジェクトのローカル空間における位置 0, 0, 0 は、そのバウンディング ボックスの重心を意味します。
- スピン インパルス X、Y、Z (Spin Impulse X, Y, Z)
-
リジッド ボディの重心に対して、X、Y、および Z で指定した方向に瞬間的なトルク(回転力)を加えます。これらの値は、マグニチュードと方向を設定します。この値を大きくするほど、トルクも大きくなります。
注:アトリビュート エディタ(Attribute Editor)には、リジッド ボディの現在の速度(Velocity)、スピン(Spin)、フォース(Force)、およびトルク(Torque)値が表示されます。これらの読み取り専用アトリビュートの詳細については、速度、フォース、衝突に関するデータの取得を参照してください。
- ソルバ ID (Solver Id)
-
リジッド ボディのダイナミクスを計算するためにソルバが使用する、読み取り専用のリジッド ボディのインデックス番号です。MEL スクリプトやエクスプレッション内でソルバ ID (Solver Id)を使用して、ソルバ内の特定のリジッド ボディを識別することができます。
初期設定(Initial Settings)アトリビュート
- 初期スピン X、Y、Z (Initial Spin X, Y, Z)
-
リジッド ボディの初期角速度を設定します。これによって、リジッド ボディに回転が与えられます。
- 初期位置 X、Y、Z (Initial Position X, Y, Z)
-
ワールド空間内でのリジッド ボディの初期位置を設定します。
- 初期方向 X、Y、Z (Initial Orientation X, Y, Z)
-
リジッド ボディの初期のローカル空間の方向を設定します。たとえば、初期方向 X (Initial Orientation X)を 90 に設定した場合、オブジェクトは X 軸を中心に 90 度の方向を向きます。この場合、単位はラジアンではなく角度です。
- 初期速度 X、Y、Z (Initial Velocity X, Y, Z)
-
リジッド ボディの初速および方向を設定します。
パフォーマンス アトリビュート(Performance Attributes)
- 代替物(Stand In)
-
リジッドボディの計算に使用する代替物としての単純な内部立方体または球を選択するためのメニューを表示します。元のオブジェクトは画面に可視のままになります。代替の球または立方体を使用する場合、再生スピードは向上しますが、衝突の反応は実際のオブジェクトとは異なります。実際のジオメトリを使用する場合は、なしを選択します。
- フォースの適用(Apply Force At)
-
重心、バウンディング ボックスのコーナー、CV または頂点のいずれかでリジッド ボディにフォース(力)を適用するかを設定するメニューを表示します。
- 重心(Center of Mass)
-
フォース(力)を重心にある単一の位置に適用します。トルクはリジッド ボディに加えられません。
- バウンディング ボックス(Bounding Box)
-
フォース(力)を、オブジェクトのバウンディング ボックスの 8 つのコーナーに適用します。これが既定の設定です。オブジェクトのバウンディング ボックスを表示するには、ビュー ウィンドウ上部のメニューからシェーディング > バウンディング ボックス(Shading > Bounding Box)を選択します。
- 頂点または CV (Vertices or CVs)
-
ポリゴン オブジェクトの各頂点で、または NURBS サーフェスの各 CV で、フォース(力)を適用します。この処理は最も処理時間を要しますが、最も精度の高い処理です。
- テッセレーション係数(Tessellation Factor)
-
NURBS オブジェクトは、リジッド ボディのダイナミクスをアニメートする前に、内部的にポリゴンに変換されます。このテッセレーション係数(Tessellation Factor)によって、変換時に作成するポリゴンの数が決まります。この数を小さくするとこのジオメトリは粗くなり、アニメーションの精度が低くなりますが、再生スピードは速くなります。
でこぼこしたサーフェスでオブジェクトを跳ね返らせる場合は、テッセレーション係数(Tessellation Factor)の値を大きくします。目的の結果が得られるまで、いろいろな値を試してください。
テッセレーション係数(Tessellation Factor)の値を変更すると、その直後に内部変換が 1 度行われます。複雑な NURBS サーフェスの場合はこの処理にやや時間がかかります。テッセレーション係数(Tessellation Factor)の値を大きくすると、リジッド ボディの衝突の検出に要する時間も長くなります。
- 衝突レイヤ(Collision Layer)
-
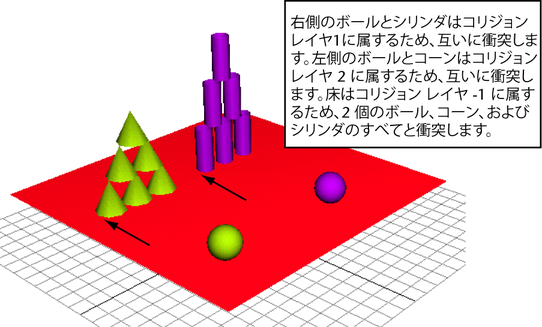
衝突レイヤを使用すると、互いに衝突するオブジェクトのグループを作成することができます。同じ衝突レイヤ番号のリジッド ボディだけが互いに衝突することができます。
たとえば、互いの方向に移動する 4 つのオブジェクトがあるとします。そして、そのうちの 1 つは他のオブジェクトを貫通するようにしたいとします。この場合、非衝突オブジェクトに他とは異なる衝突レイヤ番号を割り当てます。
衝突しないリジッド ボディを別の衝突レイヤに置くことにより、衝突の処理にかかる時間を短縮することができます。
衝突レイヤ -1 (マイナス 1)にあるリジッド ボディは、衝突レイヤ番号に関係なく、ソルバ内のすべてのリジッド ボディと衝突します。
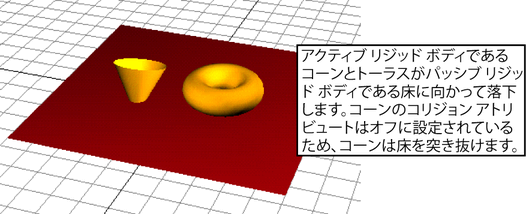
- 衝突(Collisions)
-
オフに設定した場合、リジッド ボディはシーン内のオブジェクトと衝突しません。
 ヒント:
ヒント:2 つまたはそれ以上のリジッド ボディの相互貫通アトリビュートをオンに設定することで、それらのオブジェクトだけが互いに衝突しないようにすることができます。これを行うには、まずオブジェクトを選択し、次にソルバ > リジッド ボディの相互貫通の設定 (Solvers > Set Rigid Body Interpenetration)を選択します。後で相互貫通アトリビュートをオフに設定する場合は、まずオブジェクトを選択し、次にソルバ > リジッド ボディの衝突の設定(Solvers > Set Rigid Body Collision)を選択します。
- 無視(Ignore)
-
オンに設定した場合、フィールド、衝突およびその他のリジッド ボディ エフェクトのインフルエンスがオフになります。多くの計算処理が必要なリジッド ボディを含むシーンがあり、そのいくつかを無効にしてアニメーションの再生を高速化したい場合に便利です。