Ниже приведены замечания относительно формирования типов соединений основания колонны в следующих ситуациях:
Нагрузки - основание колонны с определенными опорами
Robot показывает реакции на опору в столбе. Если местная система основания плиты не совпадает с направлением фиксированной опоры (см. реакции R1 и R2 на рис. 3), затем реакции на опору преобразуются в местную систему основания плиты (реакции Rh и Rv на рис. 3). При этом, предположим, что основание плиты всегда перпендикулярно опоре колонны. Таким образом, преобразованный набор сил используется для вычисления.
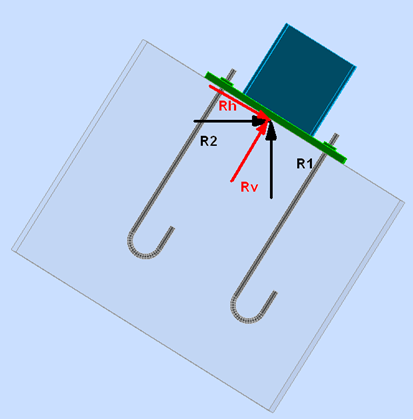
Рис. Преобразование реакции на опору (R1, R2) в местной системе основания плиты (Rh и Rv ).
Силы - основание колонны поддерживаются на других элементах конструкции
Если не поддерживается заданный узел, Robot анализирует все элементы соседние узла и располагается над основанием плиты на стороне опоры колонны. Далее вычисляется итоговой набор всех внутренних сил этих элементов, также с учитываются сосредоточенные силы и моментов приложенные к расчету узла. Полученная, таким образом, расчетная сила преобразуется в локальную систему опоры плиты.
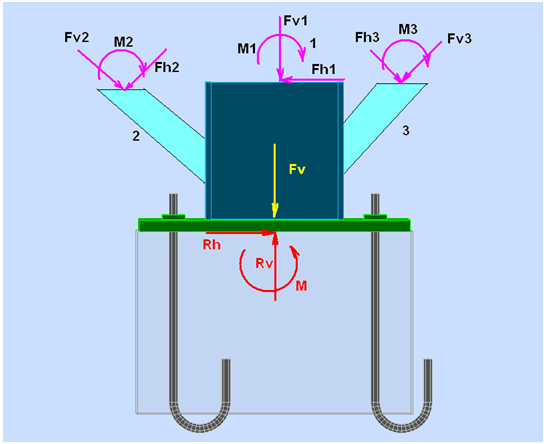
Рис.4 Все внутренние силы (Fvi, Fhi, Mi) и сосредоточенные силы (например, Fv) согласовуются и соответствующие результаты этих сил, преобразуются в местной системе опоры плиты (Rh, Rv, M).
Предположим, что основание колонны нагружена всеми элементами, расположенными выше основания плиты (1, 2 и 3 на рис.5), а элементы, расположенные на плоскости основания плиты или ниже игнорируются.
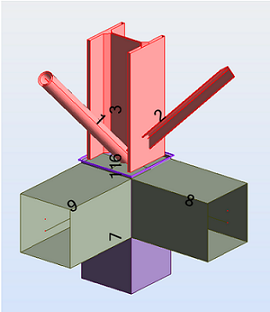
Рис. 5 Основанея колонны нагружено элементами: 1, 2 и 3, и поддерживается элементами: 7, 8 и 9.
Автоматическое формирование
Robot создает основание колонны автоматически в двух следующих случаях:
- При выборе только одного поддерживающего элемента и узла, в котором основание колонны, должны быть определено (независимо от того, опора в этом узле определяется или нет) - см. рис. 6
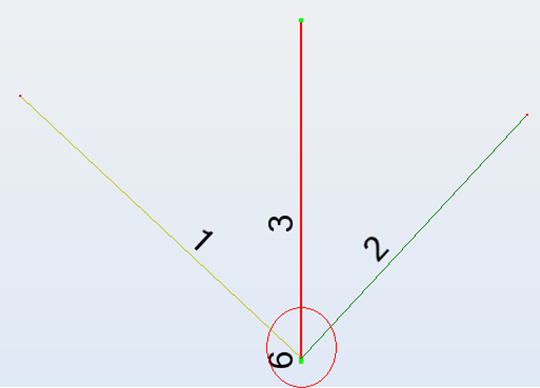
Рис. 6 Панель и узел выбраны - Robot будет формировать основание колонны.
Прим.: Исключением является ситуация, когда конец выбранного узла не поддерживается панелью консоли (другие стержневые элементы не примыкают к узлу). Основание колонны не будет создано (см. рис. 7).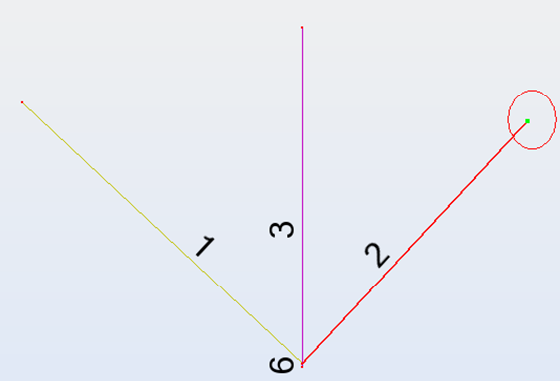
Рис. 7 Неподдерживаемый конец - основание колонны не будет создано.
- Если несколько элементов примыкающими к узлу и только один из них стальной, а остальные из других материалов, как на рис.8, основание колонны создается автоматически для стальных элементов.
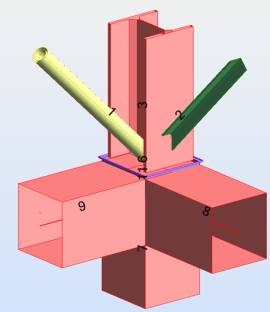
Рис. 8 ТОлько третий элемент стальной; элементы 7, 8 и 9 - ЖБ элементы; основания колонны будут созданы для элемента 3.