Resist
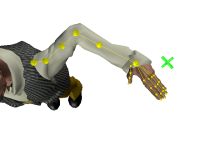
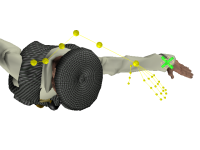
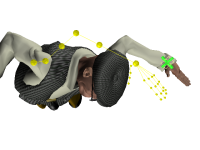
HumanIK 拉力引擎会将 Resist 值考虑在内。为了在使用反向运动学解算器时看到关节上 Resist 设置的效果,身体部位必须在传递到 IK 解算器的初始 HIKCharacterState 中弯曲,并且必须执行骨架层次更下面的效应器以拉直弯曲的关节,作为指定给其的 Pull 和到达平移值的结果。
例如,在上图中,左腕需要设置 Pull 和到达平移值,以便在将腕部平移到其目标位置时考虑肘部的 Resist 值。同样,要查看为肩部关节设置的 Resist 值的效果,肘部或腕部效应器(用于拉直肩部)必须应用 Pull 和到达平移值。
 除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。
除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。