Funkce rot vrátí bod, který je výsledkem otočení bodu kolem osy.
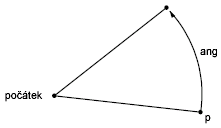
- rot(b,počátek,úhel)
-
Otočí bod b o úhel úhel kolem osy Z tak, že bod prochází bodem počátek, jak ukazuje následující příklad:
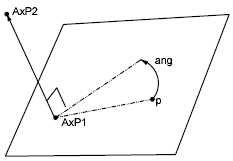
- rot(b,AxB1,AxB2,úhel)
-
Otočí bod b o úhel úhel kolem osy procházející body AxB1 a AxB2, jak ukazuje následující příklad. Osa je orientována z prvního bodu do druhého.