|
Přístup: |
Pás karet:
karta CAM
 panel Víceosé frézování
Bokem
panel Víceosé frézování
Bokem

|
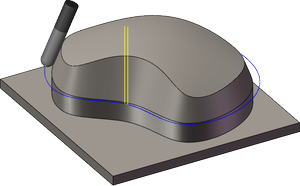
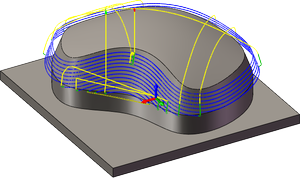
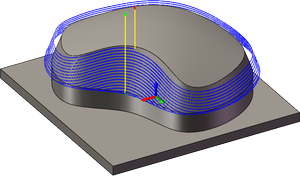
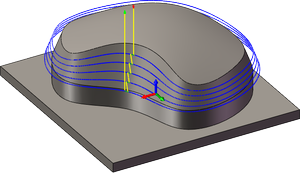
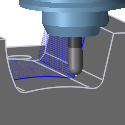
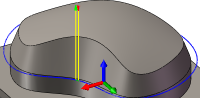
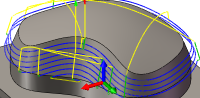
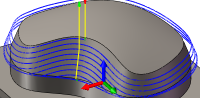
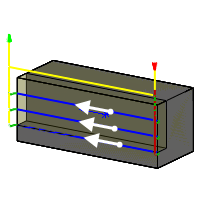
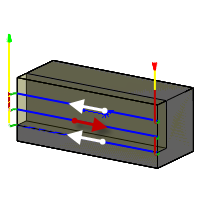
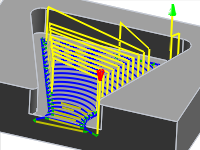
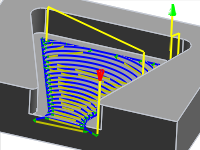
Bokem je víceosá strategie obrábění bokem nástroje. Tato strategie podporuje obrábění pouze na základě kontur i obrábění na základě povrchů. Při obrábění pouze na základě kontur je nutné kontury ručně synchronizovat. Strategie Bokem podporuje několik různých režimů, které určují, jak se mají směrem dolů obrábět strany.
Jeden záběr
Od dolní části
Oříznout od dolní části
Shora
Oříznout od horní části
Spirála
Morfovat
 Nastavení na kartě Nástroj
Nastavení na kartě Nástroj
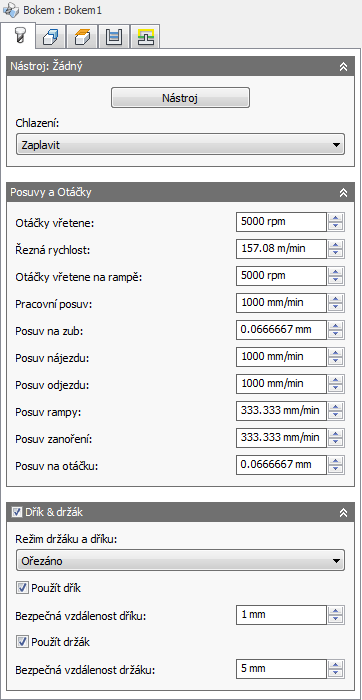
Chladivo:
Jedná se o typ chladiva použitého s nástrojem.
Rychlost vřetena:
Jedná se o rotační rychlost vřetena.
Řezná rychlost:
Jedná se o rychlost vřetena, která je vyjádřena jako rychlost nástroje na povrchu.
Rychlost vřetena na rampě:
Jedná se o rotační rychlost vřetena při provádění pohybů na rampě.
Rychlost řezného posuvu:
Jedná se o posuv použitý při řezání.
Posuv na zub:
Jedná se o rychlost řezného posuvu, která je vyjádřena jako hodnota posuvu na zub.
Rychlost posuvu při nájezdu:
Jedná se o posuv použitý při nájezdu do řezného pohybu.
Rychlost posuvu při odjezdu:
Jedná se o posuv použitý při odjezdu z řezného pohybu.
Rychlost posuvu rampy:
Jedná se o posuv použitý při provádění spirálovitého rampování do polotovaru.
Rychlost posuvu při zanoření:
Jedná se o posuv použitý při zanořování do polotovaru.
Posuv na rotaci:
Jedná se o rychlost posuvu při zanoření, která je vyjádřena jako hodnota posuvu na rotaci.
Držák a držák
Při používání nástroje s držákem je možné vybrat si v závislosti na strategii obrábění jeden z pěti různých režimů dříku a držáku. U dříku i držáku nástroje lze řešit kolize a lze jim přiřadit vlastní bezpečné vzdálenosti.
- Zakázáno – ignoruje kolize dříku a držáku.
Zakázáno
- Vytáhnout – dráha nástroje se v zájmu zachování bezpečné vzdálenosti mezi dříkem a/nebo držákem vytáhne od obrobku.
Vytáhnout
- Oříznuto – části dráhy nástroje, které zasahují do bezpečné vzdálenosti mezi dříkem a/nebo držákem, budou oříznuty.
Oříznuto
- Detekovat délku nástroje – nástroj se automaticky rozšíří dále od držáku, aby byla zachována určená bezpečná vzdálenost mezi dříkem a/nebo držákem a obrobkem. Do protokolu se uloží zpráva o vzdálenosti, o kterou byl nástroj vysunut z držáku.
Detekovat délku nástroje
- Chyba při kolizi – při narušení bezpečné vzdálenosti se výpočet dráhy nástroje zruší a do protokolu se uloží chybová zpráva.
Použít dřík
Určí, že se ve výpočtu dráhy nástroje použije dřík vybraného nástroje (aby nedocházelo ke kolizím).
Bezpečná vzdálenost dříku:
Dřík nástroje zůstane vždy v této vzdálenosti od součásti.
Použít držák
Určí, že se ve výpočtu dráhy nástroje použije držák vybraného nástroje (aby nedocházelo ke kolizím).
Bezpečná vzdálenost držáku:
Držák nástroje zůstane vždy v této vzdálenosti od součásti.
 Nastavení na kartě Geometrie
Nastavení na kartě Geometrie
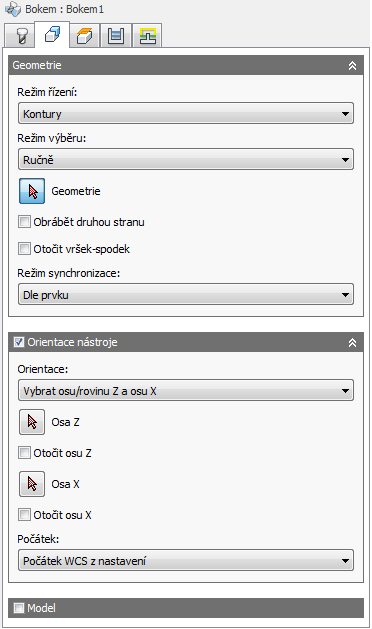
Režim řízení:
Je podporováno obrábění pouze na základě kontur i obrábění na základě povrchů. V rozevírací nabídce vyberte položku Kontury nebo Povrchy.
Režim výběru:
- Plochy –
- Páry kontur –
- Ruční –
Povrch
Jedná se o tlačítko umožňující výběr povrchů k obrobení.
Obrobit opačnou stranu
Obrátit horní a dolní část
Režim synchronizace
Při výběru položky Kontury v rozevírací nabídce Režim řízení: jsou k dispozici následující možnosti synchronizace:
- Ruční –
- Podle entity –
- Nejkratší vzdálenost –
- Konstantní spád –
- Automatické –
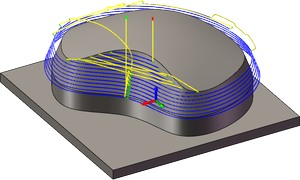
Orientace nástroje
Pomocí kombinace orientace trojice a možností počátku umožňuje určit, jak bude nástroj orientován.
Rozevírací nabídka Orientace nabízí následující možnosti nastavení orientace os X, Y a Z trojice:
- Orientace WCS z nastavení – k určení orientace nástroje se použije souřadnicový systém obrobku z aktuálního nastavení.
- Orientace modelu – k určení orientace nástroje se použije pracovní souřadnicový systém aktuální součásti.
- Vybrat osu nebo rovinu Z a osu X – výběrem plochy nebo hrany definujte osu Z a výběrem další plochy nebo hrany definujte osu X. Osy Z i X lze obrátit o 180 stupňů.
- Vybrat osu nebo rovinu Z a osu Y – výběrem plochy nebo hrany definujte osu Z a výběrem další plochy nebo hrany osu Y. Osy Z i Y lze obrátit o 180 stupňů.
- Vybrat osy X a Y – výběrem plochy nebo hrany definujte osu X a výběrem další plochy nebo hrany definujte osu Y. Osy X i Y lze obrátit o 180 stupňů.
- Vybrat souřadnicový systém – nastaví konkrétní orientaci nástroje pro tuto operaci v modelu z uživatelského souřadnicového systému (USS) aplikace Inventor. Použije se počátek i orientace existujícího souřadnicového systému. Tuto možnost použijte, pokud model neobsahuje vhodný bod a rovinu pro danou operaci.
Rozevírací nabídka Počátek nabízí následující možnosti umístění počátku trojice:
- Počátek WCS z nastavení – k určení počátku nástroje se použije počátek WCS.
- Počátek modelu – k určení počátku nástroje se použije pracovní souřadnicový systém aktuální součásti.
- Vybraný bod – k určení počátku trojice vyberte vrchol nebo hranu.
- Bod na ohraničujícím kvádru polotovaru – k určení počátku trojice vyberte bod na ohraničujícím kvádru polotovaru.
- Bod kvádru modelu – k určení počátku trojice vyberte bod na ohraničujícím kvádru modelu.
Model
Tuto možnost aktivujte, pokud chcete přepsat geometrii modelu (povrchy nebo tělesa) definovanou v nastavení.
Zahrnout model nastavení
Ve výchozím nastavení je tato možnost povolena. Kromě povrchů modelu vybraných v rámci operace je zahrnut model vybraný v nastavení. Pokud tuto možnost zakážete, bude se dráha nástroje generovat pouze na površích vybraných v operaci.
 Nastavení na kartě Výšky
Nastavení na kartě Výšky
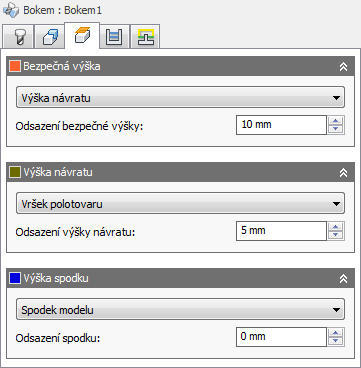
Bezpečná výška
Bezpečná výška je první výškou, do které se nástroj přesune rychloposuvem při přechodu na začátek dráhy nástroje.
Bezpečná výška
- Výška návratu: přírůstkové odsazení od výšky návratu.
- Dolní výška: přírůstkové odsazení od dolní výšky.
- Horní část modelu: přírůstkové odsazení od horní části modelu.
- Dolní část modelu: přírůstkové odsazení od dolní části modelu.
- Vršek polotovaru: jedná se o přírůstkové odsazení od vršku polotovaru.
- Spodek polotovaru: jedná se o přírůstkové odsazení od spodku polotovaru.
- Výběr: přírůstkové odsazení od bodu (vrcholu), hrany nebo plochy vybrané(ho) v modelu.
- Počátek (absolutní): absolutní odsazení od počátku, který je definován v možnosti Nastavení nebo Orientace nástroje v rámci určité operace.
Odsazení bezpečné výšky:
Použije se odsazení bezpečné výšky vztahující se k výběru bezpečné výšky v rozevíracím seznamu výše.
Výška návratu
Výška návratu určuje výšku, do které se posune nástroj před dalším řezným záběrem. Výška návratu musí být nastavena na hodnotu, která je vyšší než hodnota parametrů Výška posuvu a Vršek. Výška návratu se používá spolu s následným odsazením k určení výšky.
Výška návratu
- Bezpečná výška: přírůstkové odsazení od bezpečné výšky.
- Dolní výška: přírůstkové odsazení od dolní výšky.
- Horní část modelu: přírůstkové odsazení od horní části modelu.
- Dolní část modelu: přírůstkové odsazení od dolní části modelu.
- Vršek polotovaru: jedná se o přírůstkové odsazení od vršku polotovaru.
- Spodek polotovaru: jedná se o přírůstkové odsazení od spodku polotovaru.
- Výběr: přírůstkové odsazení od bodu (vrcholu), hrany nebo plochy vybrané(ho) v modelu.
- Počátek (absolutní): absolutní odsazení od počátku, který je definován v možnosti Nastavení nebo Orientace nástroje v rámci určité operace.
Odsazení výšky návratu:
Použije se odsazení výšky návratu vztahující se k výběru výšky návratu v rozevíracím seznamu výše.
Dolní výška
Výška spodku určuje konečnou výšku a hloubku obrábění a nejnižší hloubku, do které nástroj v polotovaru sestoupí. Výška spodku musí být nastavena na hodnotu, která je nižší než hodnota parametru Vršek. Výška spodku se používá spolu s následným odsazením k určení výšky.
Dolní výška
- Bezpečná výška: přírůstkové odsazení od bezpečné výšky.
- Výška návratu: přírůstkové odsazení od výšky návratu.
- Horní část modelu: přírůstkové odsazení od horní části modelu.
- Dolní část modelu: přírůstkové odsazení od dolní části modelu.
- Vršek polotovaru: jedná se o přírůstkové odsazení od vršku polotovaru.
- Spodek polotovaru: jedná se o přírůstkové odsazení od spodku polotovaru.
- Výběr: přírůstkové odsazení od bodu (vrcholu), hrany nebo plochy vybrané(ho) v modelu.
- Počátek (absolutní): absolutní odsazení od počátku, který je definován v možnosti Nastavení nebo Orientace nástroje v rámci určité operace.
Dolní odsazení:
Použije se odsazení spodku vztahující se k výběru výšky spodku v rozevíracím seznamu výše.
 Nastavení na kartě Záběry
Nastavení na kartě Záběry
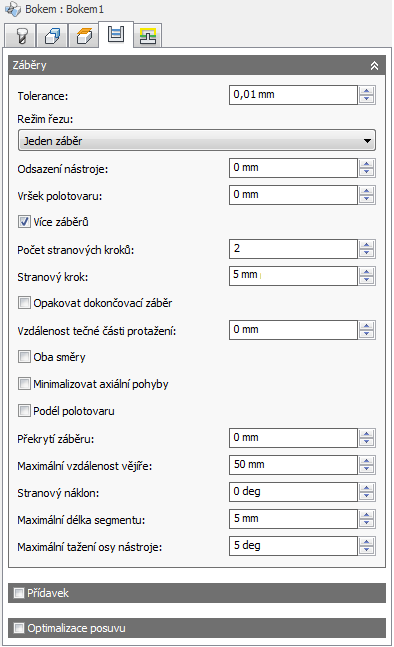
Tolerance
Tolerance obrábění je součtem tolerancí použitých při vytváření dráhy nástroje a triangulace geometrie. Chcete-li získat celkovou toleranci, je nutné přidat k této toleranci veškeré další tolerance filtrování.
Volná tolerance 0,100
Těsná tolerance 0,001
Konturovací pohyby stroje CNC jsou řízeny pomocí příkazů čar G1 a oblouků G2 a G3. Systém CAM toho dosáhne tím, že linearizuje dráhy nástroje na křivkách spline a povrchu, a tímto způsobem je aproximuje. Vytvoří se mnoho segmentů krátkých čar, které utvoří přibližnou podobu požadovaného tvaru. Přesnost, s jakou dráha nástroje odpovídá požadovanému tvaru, značně závisí na počtu použitých čar. Čím více je čar, tím více se dráha nástroje přiblíží jmenovitému tvaru spline nebo povrchu.
Nedostatek dat
Je lákavé používat vždy velmi těsné tolerance, existují však i stinné stránky tohoto postupu: delší časy výpočtu dráhy nástroje, velké soubory G-funkcí a velmi krátké pohyby po čarách. První dva problémy nejsou nijak závažné, protože aplikace Inventor HSM provádí výpočty velmi rychle a většina moderních řídicích systémů disponuje alespoň 1 MB paměti RAM. Krátké pohyby po čarách však mohou v kombinaci s vysokými rychlostmi posuvu vyústit v jev známý jako nedostatek dat.
Nedostatek dat nastane v situaci, kdy je řídicí systém příliš zahlcen daty a nedokáže je zpracovat. Řídicí systémy CNC mohou zpracovat konečný počet řádků kódu (bloků) za sekundu. Může to být pouhých 40 bloků za sekundu v případě starších strojů a 1000 bloků za sekundu u nových strojů, například řídicího systému HAAS Automation. Krátké pohyby po čarách a vysoké rychlosti posuvu mohou žádat rychlost zpracování, která přesahuje možnosti řídicího systému. Když k tomu dojde, musí stroj po každém pohybu počkat na další příkaz z řídicího systému.
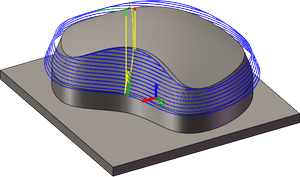
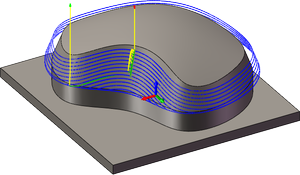
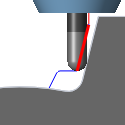
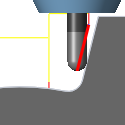
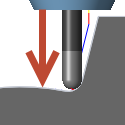
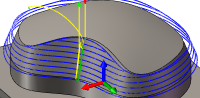
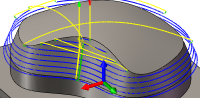
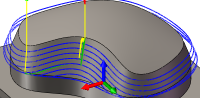
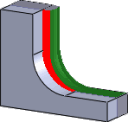
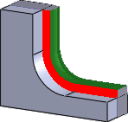
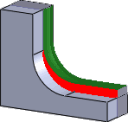
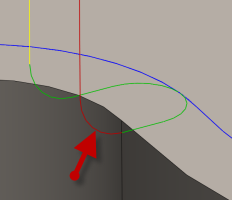
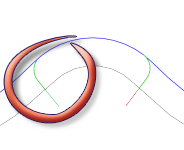
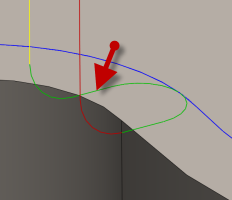
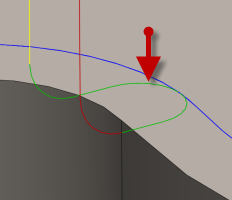
Režim řezání:
Režim řezání určuje způsob obrábění stran.
Jeden záběr
Od dolní části
Oříznout od dolní části
Shora
Oříznout od horní části
Spirála
Morfovat
Odsazení nástroje:
Určuje dodatečné odsazení podél osy nástroje vzhledem k dolní vodicí křivce.
Vršek polotovaru:
Určuje celkovou tloušťku polotovaru.
Vícenásobné záběry
Tuto možnost povolte, chcete-li zadat hodnotu stranového kroku.
Počet stranových kroků:
Jedná se o počet hrubovacích kroků.
Stranový krok:
Určuje vodorovný stranový krok mezi záběry. Ve výchozím nastavení je tato hodnota nastavena na 95 % průměru řezného nástroje zmenšeného o poloměr rohu nástroje.
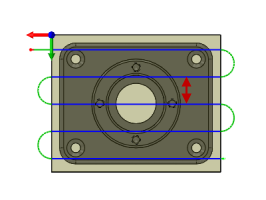
Vodorovný stranový krok
Opakovat dokončovací záběr
Tuto možnost povolte, chcete-li provést poslední dokončovací záběr dvakrát, a odebrat tak materiál polotovaru, který zbyl v důsledku vychýlení nástroje.
Vzdálenost tečné části protažení:
Určuje tečné prodloužení záběrů.
Oba směry
Určuje, že se v operaci použije k obrobení otevřených profilů sousledné i nesousledné frézování.
Nevybráno
Vybrané
Minimalizovat axiální pohyb
Podél polotovaru
Překrytí záběru:
Určuje vzdálenost, o kterou je třeba prodloužit obrábění v případě uzavřeného záběru.
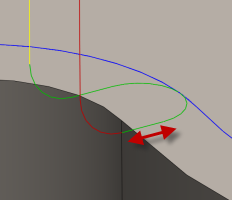
Maximální vzdálenost rozevření:
Určuje maximální vzdálenost, ve které lze rozevřít osu nástroje.
Boční náklon:
Určuje počet stupňů, o které musí být nástroj nakloněn do strany.
Maximální délka segmentu:
Určuje maximální délku jednotlivých segmentů v generované dráze nástroje.
Maximální tažení osy nástroje:
Určuje maximální změnu úhlu při tažení nástroje v jedné ose v generované dráze nástroje.
Přídavek
Kladný
Kladný přídavek – určuje množství materiálu polotovaru zbylého po operaci, který má být odebrán následnými hrubovacími či dokončovacími operacemi. U hrubovacích operací se ve výchozím nastavení ponechá malé množství materiálu.
Žádný
Žádný přídavek – odstraní veškerý přebytečný materiál až k vybrané geometrii.
Záporný
Záporný přídavek – odstraní materiál za povrchem nebo hranicí součásti. Tato technika se často používá při obrábění elektrodou, kde zohledňuje jiskřiště a umožňuje splnit toleranční požadavky součásti.
Radiální (stěna) přídavek
Parametr Radiální přídavek určuje množství materiálu, který se má ponechat v radiálním (kolmo k ose nástroje) směru, tj. na straně nástroje.
Radiální přídavek
Radiální a axiální přídavek
V důsledku stanovení kladného radiálního přídavku bude na svislých stěnách a strmých oblastech součásti ponechán materiál.
V případě povrchů, které nejsou přesně svislé, bude aplikace Inventor HSM interpolovat mezi axiální (dno) a radiální hodnotou přídavku, aby se materiál polotovaru zbylý v radiálním směru na těchto površích mohl lišit od určené hodnoty v závislosti na spádu povrchu a hodnotě axiálního přídavku.
Změnou radiálního přídavku se automaticky nastaví axiální přídavek na stejnou hodnotu, pokud ovšem hodnotu axiálního přídavku nezadáte ručně.
U dokončovacích operací je výchozí hodnota 0 mm/0", tj. nebude ponechán žádný materiál.
U hrubovacích operací se ve výchozím nastavení ponechá malé množství materiálu, který lze odebrat později pomocí jedné nebo více dokončovacích operací.
Záporný přídavek
Při použití záporného přídavku operace obrábění odstraní více hmoty z polotovaru než z tvaru modelu. Toho lze využít pro elektrody s jiskřištěm, kde velikost jiskřiště odpovídá zápornému přídavku.
Radiální i axiální přídavek může být záporný. Záporný radiální přídavek však musí být menší než poloměr nástroje.
Při použití kulového nebo toroidního řezacího nástroje se záporným přídavkem, který je větší než poloměr rohu, musí být záporný axiální přídavek menší nebo roven poloměru rohu.
Axiální (dno) přídavek
Parametr Axiální přídavek určuje množství materiálu, který se má ponechat v axiálním směru (podél osy Z), tj. na konci nástroje.
Axiální přídavek
Radiální i axiální přídavek
V důsledku stanovení kladného axiálního přídavku bude v mělkých oblastech součásti ponechán materiál.
V případě povrchů, které nejsou přesně vodorovné, bude aplikace Inventor HSM interpolovat mezi axiální a radiální (stěna) hodnotou přídavku, aby se materiál polotovaru zbylý v axiálním směru na těchto površích mohl lišit od určené hodnoty v závislosti na spádu povrchu a hodnotě radiálního přídavku.
Změnou radiálního přídavku se automaticky nastaví axiální přídavek na stejnou hodnotu, pokud ovšem hodnotu axiálního přídavku nezadáte ručně.
U dokončovacích operací je výchozí hodnota 0 mm/0", tj. nebude ponechán žádný materiál.
U hrubovacích operací se ve výchozím nastavení ponechá malé množství materiálu, který lze odebrat později pomocí jedné nebo více dokončovacích operací.
Záporný přídavek
Při použití záporného přídavku operace obrábění odstraní více materiálu z polotovaru než z tvaru modelu. Toho lze využít pro elektrody s jiskřištěm, kde velikost jiskřiště odpovídá zápornému přídavku.
Radiální i axiální přídavek může být záporný. Při použití kulového nebo toroidního řezacího nástroje se záporným přídavkem, který je větší než poloměr rohu, však musí být záporný axiální přídavek menší nebo roven poloměru rohu.
Optimalizace posuvu
Určí, že posuv má být v rozích zmenšen.
Maximální změna směru:
Určuje maximální úhlovou změnu. Pokud bude překročena, sníží se rychlost posuvu.
Zmenšený poloměr posuvu:
Určuje minimální poloměr, po jehož překročení se posuv zmenší.
Zkrácená vzdálenost posuvu:
Určuje vzdálenost zkrácení posuvu před rohem.
Snížená rychlost posuvu:
Určuje sníženou rychlost posuvu, která se má použít v rozích.
Pouze vnitřní rohy
Umožňuje snížit rychlost posuvu pouze u vnitřních rohů.
 Nastavení na kartě Napojování
Nastavení na kartě Napojování
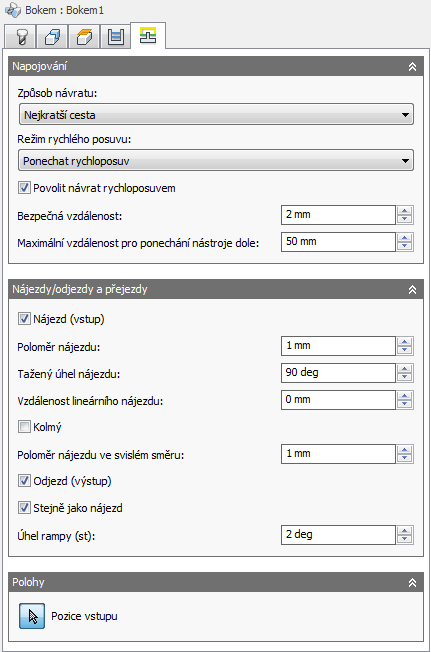
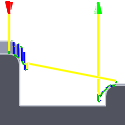
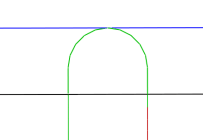
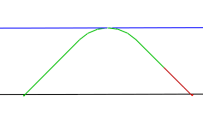
Způsob návratu:
Určuje, jak se nástroj pohybuje mezi řeznými záběry. Na následujících obrázcích je použita strategie Průtok.
- Úplný návrat – na konci záběru se nástroj před přesunem k začátku dalšího záběru zcela navrátí do výšky návratu.
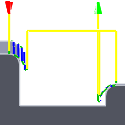
- Minimální návrat – provede posun nahoru do nejnižší možné výšky, kde nástroj ztratí kontakt s obrobkem (s přičtením libovolně určené bezpečné vzdálenosti).
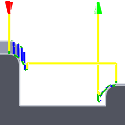
- Nejkratší cesta – přesune nástroj přímo nejkratší možnou vzdáleností mezi drahami.
Pozor: Možnost Nejkratší cesta nesmí být používána u strojů, které nepodporují linearizované pohyby rychloposuvem, kde pohyby G0 představují přímé čáry (oproti pohybům G0, které se pohybují ve směrech všech os při maximální rychlosti, někdy také nazývané jako pohyby „dog-leg“). Nedodržení tohoto pravidla zapříčiní pohyby stroje, které softwarem nelze správně simulovat, což může vést ke kolizím nástroje.
U strojů CNC, které nepodporují linearizované rychloposuvy, lze upravit postprocesor tak, aby převedl všechny pohyby G0 na pohyby rychlého posuvu G1. Chcete-li získat další informace nebo pokyny, jak daným způsobem upravit postprocesory, kontaktujte technickou podporu.
Režim vysoké rychlosti posuvu:
Určuje, kdy mají být rychloposuvy ve výstupu jako skutečné rychloposuvy (G0) a kdy mají být ve výstupu jako pohyby s vysokou rychlostí posuvu (G1).
- Zachovat rychloposuv – všechny rychloposuvy budou zachovány.
- Zachovat axiální a radiální rychloposuv – ve výstupu budou jako skutečné rychloposuvy pouze rychloposuvy, při kterých se nástroj pohybuje vodorovně (radiální) nebo svisle (axiální).
- Zachovat axiální rychloposuv – zachovají se pouze rychloposuvy, při kterých se nástroj pohybuje svisle.
- Zachovat radiální rychloposuv – zachovají se pouze rychloposuvy, při kterých se nástroj pohybuje vodorovně.
- Zachovat rychloposuv v jedné ose – zachovají se pouze rychloposuvy, při kterých se nástroj pohybuje v jedné ose (X, Y nebo Z).
- Vždy použít rychlý posuv – výstupem jsou rychloposuvy jako pohyby G01 (pohyby rychlých posuvů) místo rychloposuvů (G0).
Tento parametr se obvykle nastavuje, aby nedocházelo ke kolizím u strojů, které při rychloposuvu provádějí pohyby „dog-leg“.
Vysoká rychlost posuvu:
Rychlost posuvu, která se používá pro výstup rychloposuvů jako G1 místo G0.
Povolit návrat rychloposuvem
Pokud je tato možnost povolena, provádí se návraty rychloposuvem (G0). Tuto možnost zakažte, chcete-li vynutit návraty rychlostí posuvu odjezdu.
Bezpečná vzdálenost:
Minimální vzdálenost mezi povrchy nástroje a součásti při pohybech návratu. Vzdálenost je měřena po použití přídavku. Pokud byl tedy použit záporný přídavek, je třeba věnovat pozornost tomu, aby byla bezpečná vzdálenost dostatečně velká a zamezila jakýmkoli kolizím.
Maximální vzdálenost pro ponechání nástroje dole:
Určuje maximální vzdálenost, která je povolena pro pohyby nástroje při ponechání dole.
Maximální vzdálenost pro ponechání nástroje dole = 1"
Maximální vzdálenost pro ponechání nástroje dole = 2"
Nájezd (vstup)
Chcete-li generovat nájezd, povolte tuto možnost.
Nájezd
Poloměr nájezdu:
Určuje poloměr pohybů nájezdů.
Poloměr nájezdu
Úhel tažení nájezdu:
Určuje typ tažení oblouku nájezdu.
Úhel tažení 90°
Úhel tažení 45°
Vzdálenost lineárního nájezdu:
Určuje délku lineárního pohybu při nájezdu, pro který se v řídícím obvodu aktivujekompenzace poloměru.
Vzdálenost lineárního nájezdu:
Kolmé
Nahradí tečná prodloužení oblouků nájezdu nebo odjezdu pohybem, který je kolmý k oblouku.
Zobrazeno s kolmým vstupem nebo výstupem
Příklad: Vývrt, který má maximálně velké oblouky nájezdu nebo odjezdu (čím větší oblouk tím menší pravděpodobnost značky prodlevy) a kde tečný lineární nájezd nebo odjezd není možný, protože by se prodloužil do strany vývrtu.
Poloměr svislého nájezdu:
Jedná se o poloměr svislého oblouku, který vyhlazuje vstupní pohyb při přechodu ze vstupního pohybu na samotnou dráhou nástroje.
Poloměr svislého nájezdu
Odjezd (výstup)
Chcete-li generovat odjezd, povolte tuto možnost.
Odjezd
Stejné jako nájezd
Určuje, zda má být definice odjezdu stejná jako definice nájezdu.
Vzdálenost lineárního odjezdu:
Určuje délku lineárního pohybu při odjezdu, pro který se v řídícím obvodu deaktivuje kompenzace poloměru.
Vzdálenost lineárního odjezdu
Poloměr odjezdu:
Určuje poloměr pohybů odjezdů.
Poloměr odjezdu
Poloměr svislého odjezdu:
Určuje poloměr svislého odjezdu.

Poloměr svislého odjezdu
Úhel tažení odjezdu:
Určuje typ tažení oblouku odjezdu.
Úhel rampování (°):
Určuje maximální úhel rampování.
Pozice vstupů
Tlačítko výběru, které slouží k vybrání pozic vstupů.