|
Access: |
Ribbon:
CAM tab
 Turning panel
Stock Transfer
Turning panel
Stock Transfer

|
The Stock Transfer strategy is intended for automatic stock transfer between the two spindles. No toolpath is associated with this strategy. The post processor is responsible for outputting the desired NC code.
 Geometry tab settings
Geometry tab settings
Confinement
Toolpaths can be contained within a specific region using the Confinement button to select confinement boundaries. Confinement regions can be defined with a combination of edges, surfaces, or sketch points.
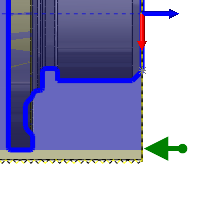
Frontside stock offset:
Specifies the distance to machine beyond the frontside of the model.
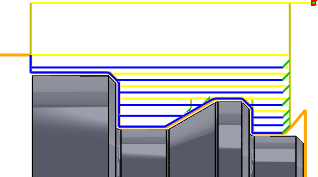
Negative Frontside Offset
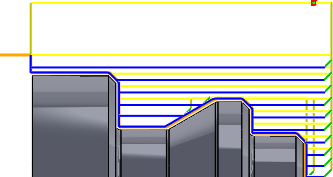
Positive Frontside Offset
 Radii tab settings
Radii tab settings
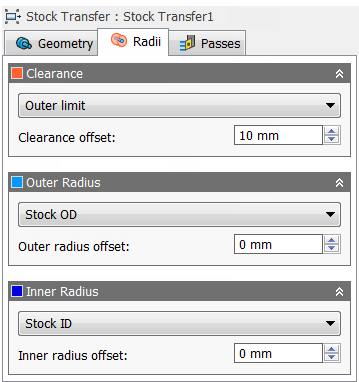
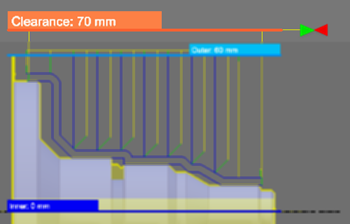
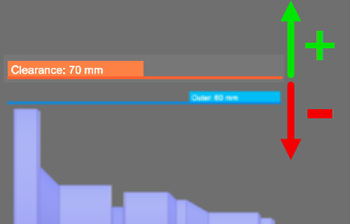
Clearance
Set this height to control the radius where the tool enters and exits the toolpath. The tool approaches and retracts from inside the stock along the Z axis (spindle axis) at this radial clearance offset. The value displayed on the orange tab represents its current radius relative to the setup axis.
Outer Clearance Radius
- Stock OD- Sets the clearance radius to match the radial extremities of the stock defined in the setup.
- Model OD - Sets the clearance radius to match the outer radial extremities of the model as defined in the setup.
- Outer radius - Choosing this option allows you to offset the clearance radius from the Outer radius. However, the clearance radius must be larger than the Outer radius, so a positive value must be entered in the Clearance offset field.
- Inner radius - Using this option in combination with the Clearance offset value allows you to drive the Clearance radius from the innermost location where tool paths are generated. This is a useful method for containing toolpath depth in certain scenarios. Make sure the clearance radius results in the tool clearing all remaining stock. This can be verified by running stock simulation.
- Model ID - Using this option in combination with the Clearance offset value allows to you to drive the Clearance radius from the smallest diameter of the defined stock. Make sure the clearance radius results in the tool clearing all remaining stock. This can be verified by running stock simulation.
- Stock ID - Using this option in combination with the Clearance offset value allows to you to drive the Clearance radius from the smallest diameter of the defined stock. Make sure the clearance radius results in the tool clearing all remaining stock. This can be verified by running stock simulation.
- Selection - Select any face, vertex, or point on the model to define the Clearance radius.
- Radius - This option allows you to enter a radius value in the Clearance offset field.
- Diameter - This option allows you to enter a diameter value in the Clearance offset field.
Clearance offset:
Specifies the clearance offset value.
Outer Clearance Offset
Outer Radius
Defines the radial confinement by limiting the outer radial range of the toolpath. You can choose from the following:
Outer Radius
- Stock OD
- Model OD
- Inner limit
- Model ID
- Stock ID
- Selection
- Radius
- Diameter
Outer radius offset:
Specifies the outer radius offset value.
Inner Radius
Defines the radial confinement by limiting the inner radial range of the toolpath. You can choose from the following:
Inner Radius
- Stock OD
- Model OD
- Outer limit
- Model ID
- Stock ID
- Selection
- Radius
- Diameter
Inner radius offset:
Specifies the inner radius offset value.
 Passes tab settings
Passes tab settings
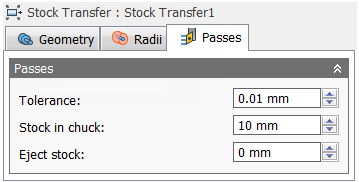
Tolerance:
The machining tolerance is the sum of the tolerances used for toolpath generation and geometry triangulation. Any additional filtering tolerances must be added to this tolerance to get the total tolerance.
Loose Tolerance .100
Tight Tolerance .001
CNC machine contouring motion is controlled using line G1 and arc G2 G3 commands. To accommodate this, CAM approximates spline and surface toolpaths by linearizing them; creating many short line segments to approximate the desired shape. How accurately the toolpath matches the desired shape depends largely on the number of lines used. More lines result in a toolpath that more closely approximates the nominal shape of the spline or surface.
Data Starving
It is tempting to always use very tight tolerances, but there are trade-offs including longer toolpath calculation times, large G-code files, and very short line moves. The first two are not much of a problem because Inventor HSM calculates very quickly and most modern controls have at least 1MB of RAM. However, short line moves, coupled with high feedrates, may result in a phenomenon known as data starving.
Data starving occurs when the control becomes so overwhelmed with data that it cannot keep up. CNC controls can only process a finite number of lines of code (blocks) per second. That can be as few as 40 blocks/second on older machines and 1,000 blocks/second or more on a newer machine like the Haas Automation control. Short line moves and high feedrates can force the processing rate beyond what the control can handle. When that happens, the machine must pause after each move and wait for the next servo command from the control.
Stock in chuck:
Specifies the amount of stock in the chuck.
Eject stock:
Specifies the amount of stock to eject from the current chuck.