- Constraint Type
- Lets you select from the following constraint types:
- Point
- Hinge
- Slider
- ConeTwist
- Six Degrees-of-Freedom
- Spring Hinge
- Spring Six Degrees-of-Freedom
For descriptions of each of these constraint types, see: Bullet Constraint Types.
- Use Reference Frame
- Lets you set a frame of Reference for the constraint axis and limits.
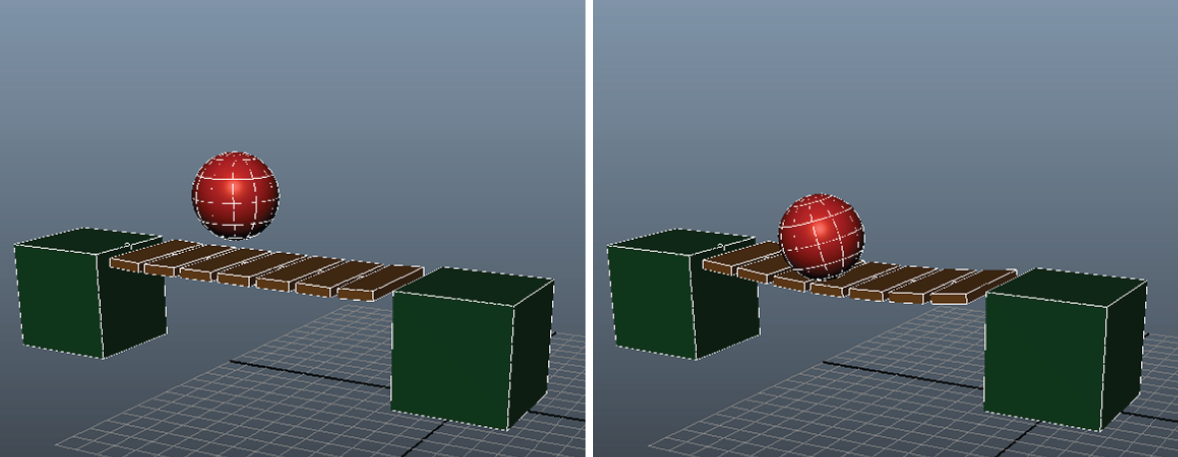
- Breakable
- Turn on Breakable to cause constraints break apart when struck with enough input force. For example, in this illustration, when the sphere drops, it does not have enough force to break the bridge constraint. But in the next image, when the sphere is raised higher, there is enough force to destroy the bridge.
 If you turn off Breakable attributes on the bridge hinges, the bridge will never break, no matter what forces are applied.
If you turn off Breakable attributes on the bridge hinges, the bridge will never break, no matter what forces are applied.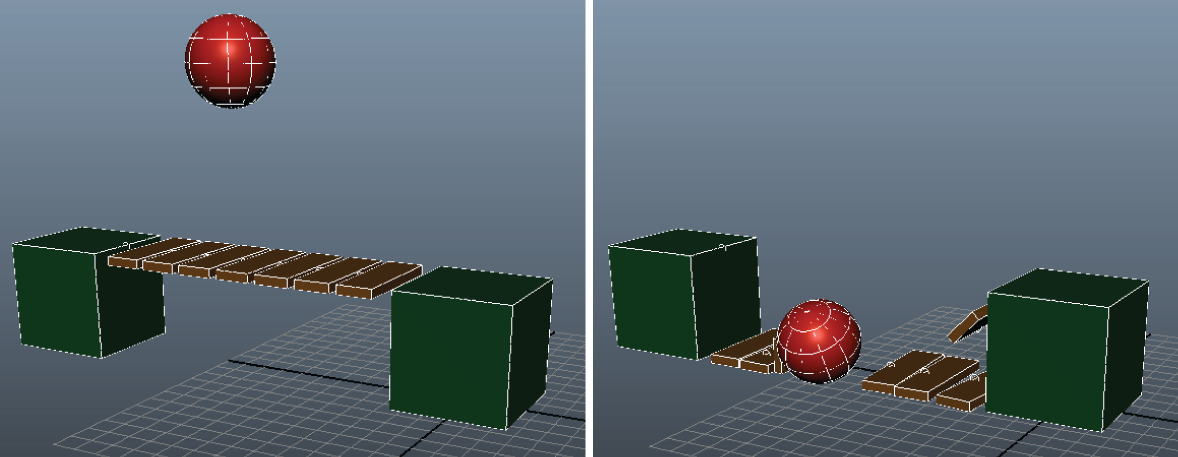
- Linear Damping
- Lets you set a value between 0.0 and 1.0 with a default of 0.01 for dampening the translation forces. A value of 1.0 fully dampens the forces applied to the translation. Applies to the Slider, 6 Degrees of Freedom constraints.
- Linear Softness
- Lets you set a value between 0.0 and 1.0 with a default of 0.0 to soften the translation forces.
- Linear Restitution
- Lets you set a value between 0.0 and 1.0 with a default of 0.0 for the restitution (or bounce) of the affected object.
- Angular Damping
- Lets you set a value between 0.0 and 1.0 with a default of 0.01 to dampen forces applied to the rotation. A value of 1.0 fully dampens the forces applied to the rotation.
- Angular Softness
- Lets you set a value between 0.0 and 1.0 with a default of 0.0 to soften forces applied to the rotation.
- Angular Restitution
- Let you set a value between 0.0 and 1.0 with a default of 0.99 for the restitution (or bounce) of the object's rotation.
- Linear Constraint X
- Lets you define whether a linear translation can be locked, free, or limited on the X-axis.
- Linear Constraint Y
- Lets you define whether a linear translation can be locked, free, or limited on the Y-axis.
- Linear Constraint Z
- Lets you define whether a linear translation can be locked, free, or limited on the Z-axis.
- Linear Constraint Min
- Lets you define the minimum X, Y, and Z translations.
- Linear Constraint Max
- Lets you define the maximum X, Y, and Z translations.
- Angular Constraint X
- Lets you define whether the axis rotation can be locked, free, or limited on the x-axis.
- Angular Constraint Y
- Lets you define whether the axis rotation can be locked, free, or limited on the y-axis.
- Angular Constraint Z
- Lets you define whether the axis rotation can be locked, free, or limited on the z-axis.
- Angular Constraint Min
- Lets you define the minimum angle, for the X, Y, and Z angles, in degrees (-360 and 360).
- Angular Constraint Max
- Lets you define the maximum angle, for the X, Y, and Z angles, in degrees (-360 and 360).
- Linear Limit Softness
- Lets you set a value between 0.0 and 1.0 with a default of 1.0.
- Linear Limit Bias
- Lets you set a value between 0.0 and 1.0 with a default of 0.3.
- Linear Limit Relaxation
- Lets you set a value between 0.0 and 1.0 with a default of 1.0.
- Angular Limit Softness
- Lets you specify the percentage of limit where the movement is free. Beyond this softness percentage, the limit is gradually enforced until the "hard" (1.0) limit is reached. The value is between 0.0 and 1.0 with a default of 1.0. The recommended value is 0.8.
- Angular Limit Bias
- Lets you specify the strength with which the constraint resists angular limit violation. The value is between 0.0 and 1.0 with a default of 0.3.
- Angular Limit Relaxation
- Lets you specify how much a constraint resists velocities which violate the angular limits. The lower the value, the less the constraint resists the violation. The value is between 0.0 and 1.0 with a default of 1.0. The recommended value is near 1.0.
- Linear Motor Enabled
- Lets you enable the powered motor to push linearly. Applies to Slider and Spring 6 Degrees of Freedom constraints.
- Linear Motor Target Speed
- Lets you set the powered motor target speed. Applies to Slider and Spring 6 Degrees of Freedom constraints.
- Linear Motor Max Force
- Lets you set the powered motor max force. Applies to Slider and Spring 6 Degrees of Freedom constraints.
- Angular Motor Enabled
- Lets you turn the motor on the X, Y, and Z axis on and off.
- Angular Motor Target Speed
- Lets you specify the target velocity for the motor's X, Y, and Z axis.
- Angular Motor Max Force
- Lets you specify the maximum motor impulse, for each X, Y, and Z axis, that can be applied at a single simulation step. It has a value greater than or equal to 0.0.
- Linear Spring X Enabled
- Lets you enable the linear spring in X translation. The Spring Hinge and Spring Six Degrees of Freedom constraints support linear and angular springs.
- Linear Spring Y Enabled
- Lets you enable the linear spring in Y translation. The Spring Hinge and Spring Six Degrees of Freedom constraints support linear and angular springs.
- Linear Spring Z Enabled
- Lets you enable the linear spring in Z translation. The Spring Hinge and Spring Six Degrees of Freedom constraints support linear and angular springs.
- Linear Spring Stiffness
- Lets you set the linear spring stiffness for the body. This is a positive value greater than or equal to 0.0. Applies to Spring Hinge (Y-axis only), and Spring 6 Degrees of Freedom constraints.
- Linear Spring Damping
- Lets you set angular spring dampening for the body. This is a positive value between the values of 0.0 and 1.0; a value of 1.0 means no dampening. Applies to Spring Hinge (Y-axis only), and Spring 6 Degrees of Freedom constraints.
- Angular Spring X Enabled
- Lets you enable angular spring in X rotation. Applies to Spring Hinge and Spring Six Degrees of Freedom constraints.
- Angular Spring Y Enabled
- Lets you enable angular spring in Y rotation. Applies to Spring Hinge and Spring Six Degrees of Freedom constraints.
- Angular Spring Z Enabled
- Lets you enable angular spring in Z rotation. Applies to Spring Hinge and Spring Six Degrees of Freedom constraints.
- Angular Spring Stiffness
- Lets you set an angular spring stiffness for the body. This is a positive value greater than or equal to 0.0. Applies to Spring Hinge and Spring Six Degrees of Freedom (Y-axis only).
- Angular Spring Damping
- Lets you set an angular spring dampening for the body. This is a positive value between the values of 0.0 and 1.0; a value of 1.0 means no dampening. Applies to Spring Hinge and Spring Six Degrees of Freedom constraints (Y-axis only).