La table système TB_JOB_STATE_TRANSITION stocke les règles de transition des états de tâches. Vous pouvez définir des règles de transition supplémentaires. Par ailleurs, vous devez effectuer cette opération au début de la configuration et de la capture des données pour toutes les tâches.
|
Attributs de TB_JOB_STATE_TRANSITION |
Description |
|
|
PREDECESSOR_ID |
Stocke la clé étrangère de l'état précédent (TB_JOB_STATE) figurant dans le diagramme des états. |
|
|
SUCCESSOR_ID |
Stocke la clé étrangère de l'état suivant (TB_JOB_STATE) figurant dans le diagramme des états. |
|
|
TRANSITION_TYPE |
Valeur indiquant ce que le logiciel doit faire lorsque la transition de l'état est exécutée.
|
|
|
TRANSITION_DIRECTION |
Valeur indiquant si la transition est effectuée vers l'avant (F) ou vers l'arrière (B). Exemple : une transition effectuée vers l'avant peut correspondre à un processus de fusion (ouvert -> en attente). Une transition effectuée vers l'arrière peut correspondre à l'annulation d'un processus de fusion (en attente -> ouvert). |
|
Les transitions dotées d'un D pour supprimer ne peuvent pas être annulées.
Le tableau suivant affiche les règles de transition des états de tâches par défaut.
|
ID |
Précédent |
Suivant |
Direction |
Type |
|
1 |
ouvert (3) |
en attente (2) |
vers l'avant (F) |
fusion (M) |
|
2 |
en attente (2) |
ouvert (3) |
vers l'arrière (B) |
fusion (M) |
|
3 |
en attente (2) |
active (1) |
vers l'avant (F) |
fusion (M) |
|
4 |
ouvert (3) |
supprimé (4) |
vers l'avant (F) |
suppression (D) |
|
5 |
en attente (2) |
supprimé (4) |
vers l'avant (F) |
suppression (D) |
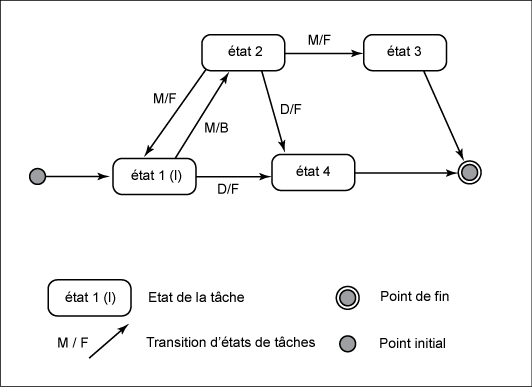
Etats des tâches et transitions des états des tâches. La direction d'une transition peut être vers l'avant (F) ou vers l'arrière (B). La direction M correspond à la fusion entre les objets.
Le point initial ne peut disposer que d'un seul état initial précédent. Il ne peut y avoir qu'un seul état initial.