[カメラ マッチ](Camera Match)ユーティリティは、ビットマップのバックグラウンド写真と 5 つ以上の特殊な「カメラ ポイント」オブジェクトを使って、写真の作成元であるカメラと位置、方向、視野が一致するように、カメラを作成または修正します。
-
 [ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More) > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ マッチ](Camera Match)を選択して[OK]をクリック
[ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More) > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ マッチ](Camera Match)を選択して[OK]をクリック
手順
[カメラ マッチ](Camera Match)を使用した一般的な手順について、以下で説明します。
カメラ マッチを使用するには:
- ビットマップを、レンダラーのバックグラウンドとしてロードします。
- ビットマップを、ビューポートのバックグラウンドとしてロードします。
- ビットマップで、マッチングに使用する要素を最低 5 つ指定します。要素には、シーン内の識別またはトラッキングが可能なオブジェクトやオブジェクトのコーナーを指定する必要があります。シーン内で常に表示され、シェイプが頻繁に変わらないものでなければなりません。
- カメラ ポイントを作成します。カメラ ポイントは次の場所にあるヘルパー オブジェクトです。
 [作成](Create)パネル
[作成](Create)パネル
 ([ヘルパー](Helpers))[カメラ マッチ](Camera Match)[オブジェクト タイプ](Object Type)ロールアウト[カメラ ポイント](Camera Point)および[作成](Create)メニュー[ヘルパー](Helpers)[カメラ ポイント](Camera Point)。(拡張メニューの場合は、[オブジェクト](Objects)メニューの[CamPoint]にあります)。
([ヘルパー](Helpers))[カメラ マッチ](Camera Match)[オブジェクト タイプ](Object Type)ロールアウト[カメラ ポイント](Camera Point)および[作成](Create)メニュー[ヘルパー](Helpers)[カメラ ポイント](Camera Point)。(拡張メニューの場合は、[オブジェクト](Objects)メニューの[CamPoint]にあります)。 シーンでは少なくとも 5 つの要素の距離について、正確に測定する必要があります。1 つの平面上にすべての要素があってはなりません。前方や後方に密集せず、シーンを通して分散しているポイントを使用するようにします。そうすれば、正確な計測結果を得ることができます。
- これらのカメラ ポイントを配置して、写真内のポイントに対応させます。[キー入力変換](Transform Type-In)を使用すると、ポイントを 3D 空間の正しい場所に配置できます。
- [カメラ マッチ](Camera Match)ユーティリティを使って、ビットマップ上のピクセル位置に[カメラ ポイント](CameraPoints)を割り当てます。
- [作成](Create)ボタンを選択します。写真を撮ったカメラと一致するように、カメラが作成されます。
エラーが発生してカメラを作成できなかった場合は、3D スペースのポイント位置を再調整し、ビットマップにもう一度割り当てます。ポイント位置の作成やビットマップの割り当ては難しい作業ですが、一度正しく行えば、マッチングがうまく機能するはずです。
レンダラーのビットマップ バックグラウンドを作成するには:
- 3ds Max をリセットし、パース ビューポートを全画面表示にします。
- [レンダリング](Rendering)メニューから[環境](Environment)を選択します。
- [環境](Environment)パネル/[共通パラメータ](Common Parameters)ロールアウトの[環境マップ](Environment Map)で、[なし](None)と表示されたグレーのボタンをクリックします。[マテリアル/マップ ブラウザ](Material/Map Browser)が起動します。
- [参照元](Browse From)領域で[新規](New)ラジオ ボタンが選択されていることを確認します。まだ選択されていない場合は、リストから[ビットマップ](Bitmap)を選択して、[OK]ボタンをクリックします。[ビットマップ イメージ ファイルの選択](Select Bitmap Image File)ダイアログ ボックスが表示されます。
- 目的のビットマップを選択し、[開く](Open)を選択します。
[マップを使用](Use Map)チェック ボックスに自動的にチェックマークが付けられます。
- ビューポートをレンダリングして、バックグラウンドが表示されていることを確認します。Shift+Q を押してレンダリングします。
ビットマップ バックグラウンドを作成してビューポートに表示するには:
- [表示](Views)メニュー [ビューポート バックグラウンド](Viewport Background)[カスタム イメージ ファイル](Custom Image File)を選択します。
これにより、[ビューポート設定](Viewport Configuration)ダイアログ ボックス
[バックグラウンド](Background)パネルが開きます。 - [バックグラウンド ソース](Background Source)領域で、[ファイル](Files)をクリックします。[バックグラウンド イメージを選択](Select Background Image)ダイアログ ボックスが表示されます。
- 目的のビットマップを選択し、[開く](Open)を選択します。
- [アスペクト比](Aspect)領域で[ビットマップに一致させる](Match Bitmap)を選択します。
- [バックグラウンドを表示(切り替え)](Display Background)チェック ボックスにチェックマークが付いていることを確認し、[OK]ボタンをクリックします。
ビューポートにバックグラウンドが表示されます。
注: [環境バックグラウンドを使用](Use Environment Background)チェック ボックスにチェックマークを付ける方法もありますが、その場合、[アスペクト比](Aspect)領域のコントロールは使用できません。
カメラ ポイント オブジェクトを作成するには:
- 次のいずれかを実行します。
- [作成](Create)パネルで ([ヘルパー](Helpers))をオンにし、ドロップダウン リストから[カメラ マッチ](Camera Match)を選択し、[オブジェクト タイプ](Object Type)ロールアウトで[カメラ ポイント](CamPoint)をオンにします。
- [作成](Create)メニュー [ヘルパ](Helpers) [カメラ ポイント](CamPoint)を選択します。(拡張メニューの場合は、[オブジェクト](Objects)メニューの[CamPoint]にあります)。
- カメラ ポイント オブジェクトをシーンの任意の場所に作成したら、それらをすべて再選択し、[キー入力変換](Transform Type-In)を使用して絶対座標を入力します。
- [キーボード入力](Keyboard Entry)ロールアウトを開きます。
- 1 つ目のカメラ ポイント オブジェクトの座標(0, 0, 0)を入力し、[作成](Create)ボタンをクリックして、[名前](name)フィールドに名前を入力します。 ヒント: キーボードを使用する場合は、最初に[X]フィールド内をクリックし、その値を入力してから、Tab を押して次のフィールドに移動し、値を入力します。[作成](Create)ボタンに移動するまでこれを続け、Enter を押して[カメラ ポイント](CamPoint)を作成します。この後で Tab を押すと、[X]フィールドに戻って、もう一度入力を始めることができます。カメラ ポイント オブジェクトをすべて既定値名で作成してから[名前による選択](Select By Name)フロータ([ツール](Tools) [選択フロータ](Selection Floater))を使って 6 つのポインタを選択し、名前を変更することができます。
- 上記の手順を繰り返して、残りのカメラ ポイント オブジェクトを作成します。 注: 別の方法として、シーン内の任意の場所にカメラ ポイント オブジェクトを作成し、それぞれをもう一度選択して、[キー入力変換](Transform Type-In)ダイアログ ボックスで各オブジェクトの絶対座標を入力することもできます。
これで、ビットマップ イメージの構成に対応した現実の座標位置に、カメラ ポイント オブジェクトを配置できました。最後の手順では、[カメラ マッチ](Camera Match)ユーティリティを使って、画面座標点を各カメラ ポイント オブジェクトに 1 つずつ指定し、そのデータに基づいてカメラ位置を生成します。
[カメラ マッチ](Camera Match)ユーティリティを使用するには:
- [ユーティリティ](Utilities)パネルで、[カメラ マッチ](Camera Match)ボタンをクリックします。
[カメラ マッチ](Camera Match)ユーティリティが表示され、[カメラ ポイント](CamPoint)オブジェクトのリストが表示されます。
- 1 つ目の[カメラ ポイント](CamPoint)オブジェクトを選択し、[位置の割り当て](Assign Position)ボタンをクリックします。
- ビットマップ内の対応する要素にカーソルを置き、クリックします。
小さな赤い十字が表示されます。
- 点の位置が正しくない場合は、もう一度マウスでクリックするか、[画面座標の入力](Input Screen Coordinates)編集ボックスを調整して位置を合わせることができます。
- リストで 2 つ目のオブジェクトを選択し、手順 3 と 4 を繰り返します。
- すべてのポイントについて、この手順を実行します。小さな赤い十字を設定すると、ビットマップ上での X/Y ピクセル位置が示されます。また、この位置が、3D スペースに作成したそれぞれの[カメラ ポイント](CamPoint)に関連付けられます。
- ポイントをすべて設定したら、[カメラを作成](Create Camera)ボタンをクリックします。
[カメラ ポイント](CamPoint)オブジェクトの位置と画面座標点の指定に基づいて、カメラがシーン内に作成されます。
注: [現在のカメラ エラー](Current Camera Error)に示された数が 5 よりも大きい場合は、少なくとも 1 つの画面座標点の配置が間違っています。それぞれの座標点をチェックし、手順 5 以降をもう一度実行します。ポイントを割り当て直した後で、既存のカメラを選択し、[カメラを修正](Modify Camera)ボタンをクリックしてカメラ位置を再計算します。 - C を押して、[パース](Perspective)ビューを新しいカメラに切り替えます。
インタフェース
[カメラ ポイント情報](CamPoint Info)ロールアウト
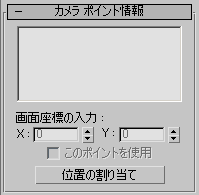
- リスト ウィンドウ
-
シーン内の[カメラ ポイント](CamPoint)ヘルパー オブジェクトのリストを表示します。このリストから[カメラ ポイント](CamPoint)オブジェクトを選択し、画面座標点を割り当てます。ビューポートで[カメラ ポイント](CamPoint)オブジェクトを選択すると、このリスト内でもハイライト表示されます。
- 画面座標の入力
- [X]、[Y]
-
2D スペースでの画面座標点の位置を微調整します。
- このポイントを使用
-
特定の座標点を、削除せずにチェックマークを消します。対応する[カメラ ポイント](CamPoint)をリストで選択してから、[このポイントを使用](Use This Point)チェック ボックスにチェックマークを付けます。この機能は、通常、[現在のカメラ エラー](Current Camera Error)が高すぎる(5 より大きいなど)場合の修正のために使用します。
- 位置の割り当て
-
ビューポートのビットマップ上の位置をクリックして、バックグラウンド イメージに対して視覚的に画面座標点を配置します。配置する座標点は、現在選択しているカメラ ポイント オブジェクトに対応します。[位置の割り当て](Assign Position)ボタンをアクティブにした後、リストからカメラ ポイント オブジェクトを選択し、そのカメラ ポイント オブジェクトの 3D シーンでの位置に対応する、ビットマップ バックグラウンドでの位置をビューポート内でクリックします。リスト内のすべてのカメラ ポイント オブジェクトについてこの処理を繰り返した後、[カメラを作成](Create Camera)ボタンをクリックすれば、配置した座標とそれに関連付けたカメラ ポイント オブジェクトとを一致させるカメラを作成できます。
[カメラ マッチ](Camera Match)ロールアウト
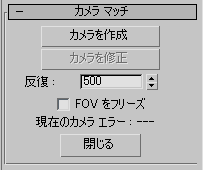
- カメラを作成
-
[カメラ ポイント](CamPoint)ヘルパーの現在位置と割り当てた画面座標点を基にした位置、方向、視野で、カメラをシーン内に作成します。
- カメラを修正
-
[カメラ ポイント](CamPoint)ヘルパーおよび割り当てた画面座標点に基づいて、選択している既存のカメラの位置、方向、視野を修正します。
- 反復
-
カメラ位置の計算の反復最大数です。既定値は 500 ですが、通常は 100 以下でも安定した動作になります。
- FOV をフリーズ
-
[カメラを作成](Create Camera)ボタンや[カメラを修正](Modify Camera)ボタンを使用したときに、カメラの視野(FOV)が変更されないようにします。写真を撮ったカメラの視野がわかっていて、それを維持する場合に使用します。
- 現在のカメラ エラー
-
最終計算の後で、配置した画面座標点、[カメラ ポイント](CamPoint)ヘルパー、およびカメラ位置の間に残っているエラー合計数を表示します。カメラのマッチングで行われる計算は完全ではありません。適切なエラー範囲は、およそ 0 から 1.5 です。
- 閉じる
-
[カメラ マッチ](Camera Match)ユーティリティを終了します。