Resist
Resist は、ジョイントが最終的なソリューションで最初の角度を維持する機能をコントロールします。
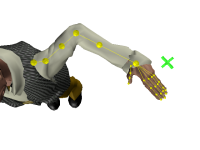
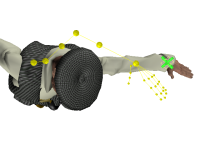
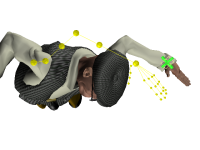
Resist 値は、HumanIK の Pull エンジンによって考慮されます。 インバース キネマティック ソルバを使用するときのジョイントの Resist 設定の効果を確認するには、ボディ パーツを IK ソルバに渡された最初の HIKCharacterState で曲げ、スケルトン階層の下位にあるエフェクタが、割り当てられた Pull 値と Reach Translation 値の結果として、曲がったジョイントを伸ばすように作用している必要があります。
たとえば、上記の図では、左手首をターゲット位置に移動するときに肘の Resist 値が考慮されるようにするには、Pull 値と Reach Translation 値を使用して左手首を設定する必要があります。同様に、肩ジョイントに設定された Resist 値の効果を確認するには、肘または手首のエフェクタ(肩を伸ばすために機能している方)に Pull 値と Reach Translation 値を適用する必要があります。
Resist 設定が可能なジョイント
すべてのエフェクタに Resist 値を設定することが可能ですが、それらの Resist 値は次のジョイントに対してのみ考慮されます。
- 左肘と右肘。
- 左肩と右肩。
- 左膝と右膝。
- ヒップ、胸、脊髄、首。
 特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。
特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。