クリーチャーをセットアップする
手順 1: クリーチャーの略図を作成する
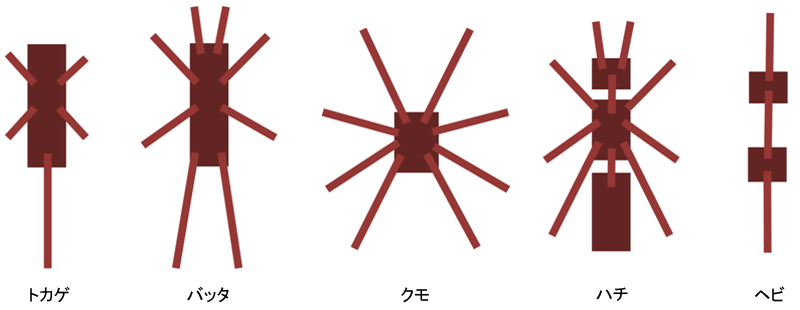
クリーチャーは、「チェーン」と「セクション」という 2 つのベース要素を組み合わせて構成されます。チェーンは手足(または触覚、尻尾、触手、下顎など)、または首や背骨などの 2 つのセクション間をつなぐリンクになります。セクションを持たないクリーチャーを作成することもできます(IK をそのボディ全体ではなく、手足にのみ実行する場合)。セクションは中枢的なボディ パーツです。それらはいくつかのチェーンの接合点と考えることができます。チェーンは完全に伸びた状態に達するとセクションを引き寄せる場合があります(「FullBodyIK」と呼ばれます)。
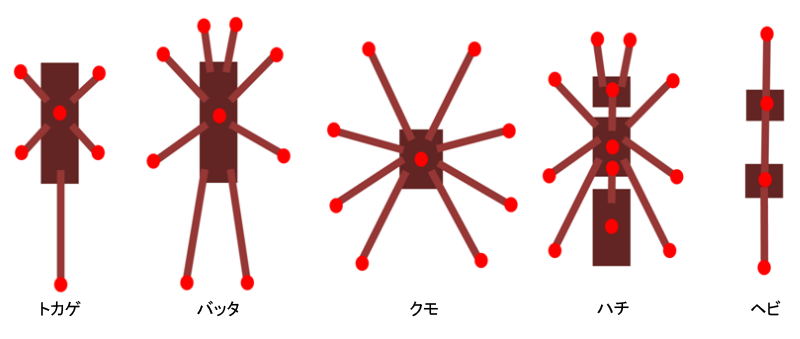
HumanIK は、各チェーンに対して 1 つのエフェクタを自動的に作成し、それをチェーンの末端に配置します(中間エフェクタはありません)。このエフェクタは、このチェーンを使用して到達したターゲットの位置と方向を定義します。
HumanIK はまた、各セクションに対して 1 つのエフェクタを作成します。このエフェクタは、このセクションを使用して到達したターゲットの位置と方向を定義します。
コードを作成する前に、チェーンとセクションを使ってクリーチャーの略図を書くことをお勧めします。サンプルに含まれているクリーチャーの略図を以下に示します。
通常、同じクリーチャーを実装するのにさまざまなオプションがあります。クリーチャーのどの部分をアニメートするか、どのようにアニメートするかに応じて、いろいろな組み合わせを選択して変化を付けることができます。次の図は、サンプルのクリーチャーのアニメーションをコントロールするために自動的に作成されるエフェクタを示しています。
手順 2: クリーチャーのチェーンのタイプを選択する
略図を書き終えたら、実際のチェーンのソルバ タイプを選択します。計算する付属器官のタイプ、期待する品質、CPU の制約などにもよりますが、1 つのチェーンのソルバ タイプを全体に適用すると良いでしょう。クリーチャーの 3D モデルに存在するジョイントの実際の数がこの選択に影響を与えることはありません。HumanIK に対してすべてのスケルトン ジョイントを宣言する必要はありません。スケルトン ジョイントのいくつかをスキップしても構いません。これはパフォーマンスを向上させる効果があります。たとえば、5 つのジョイントを持つ脚に TwoBoneIK Chain ソルバをアタッチしても構いません。また、LOD の方法を実装するために、チェーンの計算時間を実行中に変更することもできます。チェーンのソルバ タイプを確定的に定義する必要はありません。
次の図は、サンプルのクリーチャーに対して選択されているチェーンのソルバ タイプを示しています。
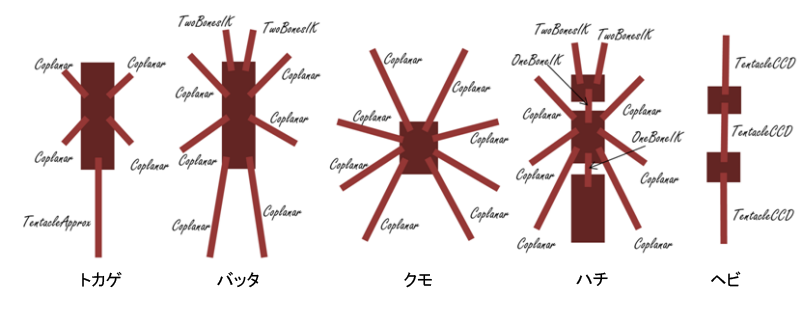
現在は、クリーチャー ソルバに実装されているチェーンには 5 つのタイプがあります。
手順 3: コードに移動する
- クリーチャーの定義を使用してソルバを初期化します。 以下に示すコードは、トカゲを動作させる場合の例です(上記のセクションの図を参照)。
#define NB_LIZARD_CHAINS 5 // 4 legs and 1 tail HIKCreatureDefinition lDefinition; memset(&lDefinition, 0, sizeof(HIKCreatureDefinition)); HIKCreatureChainDefinition * lChainDefinitions = new HIKCreatureChainDefinition[NB_LIZARD_CHAINS]; lDefinition.mNbChains = NB_LIZARD_CHAINS; lDefinition.mChains = lChainDefinitions; lDefinition.mHasParentOffset = false; lDefinition.mHasLimits = false; HIKCreatureSectionDefinition * lSectionDefinitions = NULL; lSectionDefinitions = new HIKCreatureSectionDefinition[1]; lDefinition.mNbSections = 1; lDefinition.mSections = lSectionDefinitions;
- それぞれの計算チェーンに対してジョイントの数を設定します。スケルトンのジョイントをすべて宣言する必要はありません。IK ソルバに必要なジョイントを宣言すれば、その他のスケルトン
ジョイントはスキップして構いません。
for(int i=0; i<NB_LIZARD_CHAINS; i++) { switch(i) { case LIZARD_CHAIN_FRONT_LEG_L : case LIZARD_CHAIN_FRONT_LEG_R : lChainDefinitions[i].mNbNodes = 4; // 4 joints for the back legs break; case LIZARD_CHAIN_BACK_LEG_L : case LIZARD_CHAIN_BACK_LEG_R : lChainDefinitions[i].mNbNodes = 3; // 3 joints for the back legs break; default: lChainDefinitions[i].mNbNodes = 6; // 6 joints for the tail break; } lChainDefinitions[i].mSection = 0; // All Chains are attached to Section 0 lChainDefinitions[i].mNbParentOffsets = 0; lChainDefinitions[i].mNbLimits = 0; } - セクションの定義を設定します。これが終わったら、この定義から HIKCreature オブジェクトを作成するために HumanIK の API 関数を呼び出します。評価版をお使いの場合、次の関数に対し、お使いのライセンス文字列をコピーして最後のパラメータとして使用してください。
lSectionDefinitions[0].mParentChain = -1; mHIKCreature = HIKCreatureCreate(&lDefinition, &malloc, "LicenseHere!!!"); if(mHIKCreature == NULL) return false;
コードをさらに記述する前に、Verbose ビルドに対して構築されたアプリケーションを使って、ここまでのコードの実行を試す必要があります。これにより、エラーをモニタするためのログ ファイル (humaniklog.txt) が生成されます。クリーチャー ソルバはキャラクタ ソルバよりもはるかに詳細なレポートを出力します。
- クリーチャー キャラクタライゼーションのポーズを HumanIK に指定します。宣言済みチェーン ジョイントのそれぞれと宣言済みセクションのそれぞれに対し、デフォルト位置、デフォルト方向、デフォルト スケールを指定したソルバを与える必要があります。これらの変換はクリーチャーの「自然なポーズ」から作成する必要があります。「自然なポーズ」は「T スタンス」ではなく(T スタンスは自然に見えません)、すべての手足が明示的な角度で折り曲げられている一般的なポーズです(角度がフラットまたはゼロではなく、完全に伸ばしきった状態でもない)。
HIKCreatureSetCharacterizeNodeStateTQSfv( mHIKCreature, lLizardProfile->mBoneMapping[i].mChainID, lLizardProfile->mBoneMapping[i].mBoneID, jointTranslation, jointOrientation, jointScale);注: この関数呼び出しの 2 番目のパラメータは、チェーン変換の設定時は正の値で、セクション変換の設定時は負の値です。クリーチャー定義内のチェーンとセクションの宣言順序により、ID が定義されます(配列内の単純なインデックス)。3 番目のパラメータには、チェーンを扱う場合はゼロでない値のみを設定します。これにより、設定することが必須であるチェーンの始点からのジョイント インデックスが定義されます。注:クリーチャーが親のオフセットまたはジョイントの制限を実装した場合(上記の手順 1 と 2 で設定したセクションとチェーンの定義に事前宣言された通り)、実際にはどのノードが親のオフセットやジョイントの制限を実装するのかを示す必要があります。これはチェーン ノードに対してのみ必要で、セクション ノードには必要ありません。特定のノードが親のオフセットを実装した場合、そのノードに対して HIKCreatureSetHasParentOffset 関数を呼び出してタグ付けされるようにする必要があります。特定のノードがジョイントの制限を実装した場合、そのノードに対して HIKCreatureSetHasLimits 関数を呼び出してタグ付けされるようにする必要があります。 - HIKCreatureCharacterizeGeometry 関数を呼び出して、作成したキャラクタライゼーションを検証します。
bool result = HIKCreatureCharacterizeGeometry(mHIKCreature); if(res == false) { // Something is wrong. Check your log. } - 初期化シーケンスを完成させるために、「チェーンの固さ」などのその他のパラメータとともに、初期チェーンのソルバ タイプを設定します。
// Set Chain types HIKCreatureSetChainSolvingType(mHIKCreature, LIZARD_CHAIN_TAIL, HIKChainSolvingTypeTentacleApprox); HIKCreatureSetChainSolvingType(mHIKCreature, LIZARD_CHAIN_FRONT_LEG_L, HIKChainSolvingTypeCoplanar); HIKCreatureSetChainSolvingType(mHIKCreature, LIZARD_CHAIN_FRONT_LEG_R, HIKChainSolvingTypeCoplanar); HIKCreatureSetChainSolvingType(mHIKCreature, LIZARD_CHAIN_BACK_LEG_L, HIKChainSolvingTypeCoplanar); HIKCreatureSetChainSolvingType(mHIKCreature, LIZARD_CHAIN_BACK_LEG_R, HIKChainSolvingTypeCoplanar); // Add stiffness to front leg chains HIKCreatureSetChainStiffness(mHIKCreature, LIZARD_CHAIN_FRONT_LEG_L, 0.75f); HIKCreatureSetChainStiffness(mHIKCreature, LIZARD_CHAIN_FRONT_LEG_R, 0.75f); // No stiffness at all for the tail HIKCreatureSetChainStiffness(mHIKCreature, LIZARD_CHAIN_TAIL, 0.0f);
ソルバに FullBodyIK の pull と torque を計算させるかどうかを指定することができます。 これらの機能を有効にすると結果を向上させることができますが、CPU の負担が増えます。次の関数を使うことにより、pull と torque の計算をいつでも有効化/無効化できます(たとえば、クリーチャーがカメラに近づいたときにだけ有効にすることができます)。
// Enable both pull and torque HIKCreatureEnableFBIK(mHIKEffectorSetState, true); HIKCreatureEnableTorque(mHIKEffectorSetState, true);
- 上記の手順(手順 1、2、および 4)でノードの制限を事前に宣言していた場合、ここで HIKCreatureSetLimitsfv 関数を呼び出すことによって関連ノードに対する実際の制限を定義することができます。クリーチャー ソルバの制限はキャラクタ ソルバと同様に動作します。
- ログ ファイル (humaniklog.txt)をチェックします。キャラクタライゼーションのプロセス中に無効な変換が発生した場合、HumanIK はこのファイルに警告またはエラーを書き込みます。
 特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。
特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。