アクチュエータ要素は、任意の方向に向けることが可能な単一の線です。アクチュエータ要素の 1 つの節点をマスタ、反対側の節点をスレーブと考えます。解析中、スレーブ節点は荷重曲線に従ってマスタ スレーブに対して遷移または回転し、、液圧シリンダまたはモータをシミュレーションできます。マスタ節点は拘束されるか、構造にアタッチされている必要があります。また、スレーブ節点は構造にアタッチされている必要があります。
解析で使用できるアクチュエータ要素には 3 つのタイプがあります。アクチュエータ要素のタイプは、[要素定義]ダイアログ ボックスの[アクチュエーションのタイプ]ドロップダウン ボックスで選択できます。
- 2 つの節点間の距離のみが規定されている場合、[距離(変位)]オプションを選択します。アクチュエータ要素に適用されている構造の回転は、選択したオプションによって、自由または等しくなるように強制できます(後述の「アクチュエータ要素の拘束」を参照してください)。
- 節点間の距離が制御できない場合で、スレーブ節点がマスタ節点に相対して指定の軸回転を行っている場合、[相対軸回転]オプションを選択します。軸回転は、アクチュエータ要素の 2 つの節点間の直線の周りを回転するよう定義されます。スレーブ節点は、かかった荷重への反作用として、マスタ節点に相対して自由に平行移動することに注意してください。アクチュエータは長くすることも短くすることもできます。
- 節点間の距離が指定されている場合で、スレーブ節点がマスタ節点に相対して指定の軸回転を行っている場合、[距離と軸回転の両方]オプションを選択します。
相対変位と回転を制御する
スレーブ節点のマスタ節点に相対する変位は、[要素定義]ダイアログの[変位]タブで指定します(このタブのコントロールは、[アクチュエーションのタイプ]ドロップダウン ボックスで[相対軸回転]オプションが選択されている場合は使用できません)。相対変位の制御に使用する荷重曲線を、[指定した長さ(荷重)曲線数]ドロップダウン ボックスで指定します。定数因子でさらに乗算する荷重曲線の場合、定数因子を[荷重曲線乗数]フィールドで指定します。
- アクチュエータ要素の長さが瞬時に変更されると、モデルが不安定になるため、アクチュエータ要素は、時間 T での荷重(またはこの場合は長さ)が荷重の大きさと荷重曲線乗数をかけた値と等しくなるという定型の公式は使用しません。代わりに、アクチュエータ要素の、時間ステップ中の長さの変化は、荷重曲線乗数の変化と等しくなります。すなわち、
- L(t) = L(t=0) + (LCM(t) - LCM(t=0)) x 乗数
- ここで L(t)は時間 t でのアクチュエータの長さ、LCM(t)は時間 t での荷重曲線乗数で、乗数は[荷重曲線乗数]フィールドで指定した定数因子です。要素は、荷重曲線に従って、最初の長さ L(t=0)よりも長くまたは短くできます。
スレーブ節点のマスタ節点に相対する軸回転は、[要素定義]ダイアログの[回転]タブで指定します(このタブのコントロールは、[回転(荷重)曲線数のタイプ]ドロップダウン ボックスで[距離(変位)]オプションを選択した場合には使用できません。相対回転の制御に使用する荷重曲線を、[指定した回転(荷重)曲線数]ドロップダウン ボックスで指定します。定数因子でさらに乗算する荷重曲線の場合、定数因子を[荷重曲線乗数]フィールドで指定します。荷重曲線に使用する長さの制御と同様、時間ステップでのアクチュエータの回転の変化(回転数で測定)は荷重曲線乗数の変更と等しくなります。すなわち、
ϑ(t) = ϑ(t=0) + (LCM(t) - LCM(t=0)) x 乗数
ここで、ϑ(t)は時間 t でのアクチュエータの回転角度(回転数で測定)、LCM(t)は時間 t での荷重曲線乗数で、乗数は[荷重曲線乗数]フィールドで指定した定数因子です。
アクチュエータ要素の拘束
アクチュエータ要素の回転動作の制御に使用できるパラメータには 3 つあります。マスタ節点の軸回転に従うスレーブ節点の軸回転の場合、[要素定義]ダイアログ ボックスの[拘束]タブで、[要素両端の軸回転を結合]チェック ボックスをオンにします。このチェック ボックスは、アクチュエータの距離のみが制御されている場合に使用できます。アクチュエータの回転角度が制御されている場合は使用できません。アクチュエータ要素に垂直な 2 つの回転、またはマスタ節点に相対するスレーブ節点の平面回転は、[要素定義]ダイアログ ボックスの[拘束]タブで、[要素両端の面回転を結合]チェック ボックスをオンにすると、強制的に等しくすることができます。図 1 を参照してください。
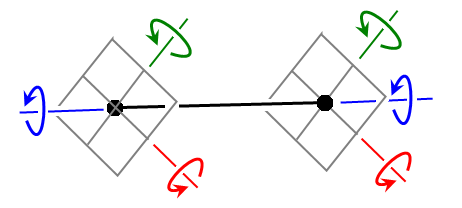
図 1: アクチュエータの端点での回転の結合
既定では、アクチュエータ要素(黒)および構造(グレー)間の接続は、ボール ジョイントと同様に動作します。各端点の構造は、それぞれが独立して、3 つの方向すべてで回転できます。[要素の 2 つの端点の軸回転を結合]オプションがオンになっている場合、トルクは、各端点にアタッチされている構造の軸回転角度(青い矢印)が同一になるよう、アクチュエータに伝達されます。[要素の 2 つの端点の平面回転を結合]オプションがオンになっている場合、アクチュエータにアタッチされている構造の垂直回転角度(緑および赤矢印)が同一になるよう、運動率がアクチュエータに適用されます。
当然、アクチュエータにアタッチされた構造の回転は、ビームやシェル要素のように、構造の要素に自由回転角度がある場合にのみ制御できます。
高度なアクチュエータ要素パラメータ
アクチュエータ ジオメトリが更新される頻度を制御できます。ジオメトリは、各収束時間ステップ後に常に更新されます。各時間ステップの反復後にジオメトリを更新する場合、[要素定義]ダイアログの[高度]タブにある[ジオメトリの更新基準]ドロップダウン ボックスで[前回の反復]オプションを選択します。
アクチュエータ要素の基本的な使用手順
- 単位系が定義されていることを確認します。
- モデルで非線形の解析タイプを使用していることを確認します。
- アクチュエータ要素にするパーツの[要素タイプ]の見出しを右クリックします。
- [アクチュエータ]コマンドを選択します。
- [要素定義]の見出しを右クリックします。
- [要素定義を編集]コマンドを選択します。
- [アクチュエーションのタイプ]ドロップダウン ボックスで、このパーツに適用するアクチュエータ要素のタイプを選択します。
- アクチュエータ要素のタイプによって、該当タブの該当情報を指定します。
- [OK]ボタンを押します。