Biped의 역운동학 솔루션에는 팔과 다리 키프레임 트랙의 각 키에서 설정하는 세 가지 매개변수가 있습니다.
관절이 각 키 프레임을 통해 움직입니다.
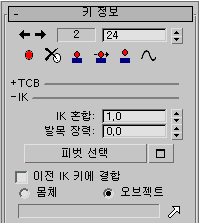
- IK 혼합 순운동학 및 역운동학을 혼합하는 모션 보간을 설정합니다. 이를 사용하면 손 또는 발이 움직이는 모션과 흔들리는 모션을 혼합할 수 있습니다. 팔을 회전하여 손을 움직이는 것은 순운동학의 예입니다. 손의 위치를 사용하여 팔을 움직이는 것은 역운동학의 예입니다. 기본 혼합값은 0.0 또는 전체 순운동학입니다. 1.0의 IK 혼합은 전체 역운동학입니다.
- 몸체 또는 오브젝트는 IK 경로의 참조 좌표 공간을 결정합니다. 이를 사용하여 캐릭터의 몸체와 함께 IK 경로를 움직이거나 일시적으로 손이나 발을 다른 오브젝트 뒤에 연결합니다. 기본값은 몸체입니다.
- 이전 IK 키에 결합 키가 이전 키의 일부이며 이전 키와 같은 참조 위치를 가져야 하는지의 여부를 결정합니다.
Biped에는 이 매개변수를 설정할 수 있는 세 가지 자동 방법이 있습니다. 고정 키, 슬라이딩 키 또는 자유 키를 설정하여 이 세 매개변수의 여러 가지 조합으로 키를 만듭니다.
- 고정 키를 설정하여 IK 혼합가 1.0으로 설정되고, 오브젝트 및 이전 IK 키에 결합이 설정되어 있는 키를 만듭니다.
- 슬라이딩 키를 설정하여 IK 혼합가 1.0으로 설정되고, 오브젝트가 설정되어 있으며 이전 IK 키에 결합은 해제되어 있는 키를 만듭니다.
- 자유 키를 설정하여 IK 혼합가 0으로 설정되고 몸체가 해제되어 있는 키를 만듭니다. 이전 IK 키에 결합은 해제됩니다.
IK 혼합
IK 혼합 컨트롤은 키 정보 롤아웃에 있으며 IK 구분선 막대를 확장하면 표시됩니다. 키프레임 모드에서 IK 혼합를 설정합니다.
IK 그룹 매개변수
IK 혼합는 팔이나 발 트랙마다 키를 설정합니다. IK 혼합 설정은 특수 키에서 팔이나 다리가 역운동학, 순운동학을 사용하거나 또는 두 동작 솔루션을 혼합하여 움직이는지를 결정합니다.
0.0의 IK 혼합 값은 전체 순운동학입니다. 팔 또는 발이 해당 키에서 관절의 회전을 보간하여 움직입니다. 이 경우 손 또는 발이 원형 호를 스윕하여 움직이고 모션은 관절의 흔들림을 통해 움직이는 것처럼 표시됩니다.
1.0 의 IK 혼합 값은 손 또는 발의 전체 역운동학이 엔드 이펙터로 사용하는 것을 의미합니다. 스플라인 경로는 손의 키를 통해 계산되고 손은 해당 경로를 따라 움직입니다. 나머지 팔의 관절 각도는 스플라인을 따라 움직이도록 계산됩니다. 이 경우 모션은 손 또는 발의 방향을 따라 움직이도록 표시됩니다.
0.0과 1.0 사이의 IK 혼합 값은 순운동학 및 역운동학의 조합입니다. IK 혼합가 0.0에 가까우면 이 솔루션에서 순운동학에 더 많은 가중치를 두고 IK 혼합가 1.0에 가까우면 역운동학에 더 가중치를 둡니다.
Biped가 걷고 있는 경우와 같이 팔이 흔들리게 하려는 경우 순운동학을 사용하는 것이 가장 좋습니다. 하지만 권투 선수의 경우 펀치를 날릴 때 손은 방향이 지정된 경로를 따라 움직여야하므로 역운동학을 사용해야 합니다.
키의 IK 혼합 값을 설정하려면 다음을 수행하십시오.
-
 Biped 팔 또는 다리에서 하나 이상의 부분을 선택하여 단일 팔이나 다리 트랙을 선택합니다.
Biped 팔 또는 다리에서 하나 이상의 부분을 선택하여 단일 팔이나 다리 트랙을 선택합니다. IK 영역에 있는 IK 혼합 스피너 및 기타 컨트롤은 팔이나 다리 트랙 하나를 선택해야만 활성화됩니다.
-
 기존에 키가 없으면 키를 설정합니다.
기존에 키가 없으면 키를 설정합니다. - 원하는 IK 혼합 값을 설정합니다.
몸체 및 오브젝트 옵션
기본적으로 Biped는 그림의 질량 중심의 좌표 체계 또는 몸체 좌표 체계를 사용하여 동작 솔루션을 계산합니다. 즉, 캐릭터가 움직임에 따라 손 또는 팔의 IK 경로가 변환되고 회전된다는 것을 말합니다. 예를 들어 권투 선수의 손 궤적은 권투 선수 몸을 움직이고 가볍게 잽을 날리고 돌리는 움직임에 따라 이동합니다.
오브젝트 옵션은 장면의 팔 다리 및 기타 오브젝트 간에 동적 연결을 애니메이션하는 데 유용합니다.
IK 혼합는 Biped 팔이나 다리(손 또는 발) 키가 현재로 되어 있는 경우 활성화됩니다.
이전 IK 키에 결합
이 IK 제약 조건은 발자국이 슬라이딩하거나 고정되는지 여부를 지정하는 데 사용합니다. 이전 IK 키에 결합이 설정되어 있으면 Biped 발은 발이 고정된 채로 이전 키의 참조 위치를 유지합니다. 이전 IK 키에 결합이 발자국 동안 해제되어 있으면 다리는 슬라이딩 발자국을 만드는 새 위치로 이동할 수 있습니다.
이전 IK 키에 결합은 공간에서 Biped 손을 잠그는 기능을 합니다. Biped 손에서 고정 키 설정을 사용하여 공간에서 해당 위치를 잠급니다.