- 270도 회전 경로 반지름
- 270도 회전(즉, 왼쪽으로 주행하는 차량의 우회전 또는 오른쪽으로 주행하는 차량의 좌회전)을 수행하는 차량의 최고속 차량 경로의 최소 반지름입니다.
- 270도 회전 경로 속도
- 270도 회전 경로 반지름에 해당하는 속도입니다.
- 90도 회전 경로 반지름
- 90도 회전(즉, 왼쪽으로 주행하는 차량의 좌회전 또는 오른쪽으로 주행하는 차량의 우회전)을 수행하는 차량의 최고속 차량 경로의 최소 반지름입니다.
- 90도 회전 경로 속도
-
90도 회전 경로 반지름에 해당하는 속도입니다.
- 활성 히치
- 막대가 전면 축 또는 연결 점에 연결된 후면을 향하는 견인으로 구성된 후면 축의 유형(따라서 '활성')입니다.
- 실제 휠베이스
- 트랙터의 맨 안쪽 축 간 거리 또는 킹핀 또는 견인 피벗 점에서 견인 또는 세미-트레일러의 맨 안쪽 후면 축까지의 거리입니다.
- 50m구간에서 접근 경사
- 원형교차로에 접근하기 마지막 50m구간에서의 평균 경사입니다.
- 접근 절반 폭
- 진입 플레어에서 접근 업스트림의 한 지점에서, 중앙선에서 가장 가까운 연석 선까지 측정된 접근 도로의 폭입니다.
- 접근 정지 시선 거리
- 원형교차로에 접근할 때 필요한 시선입니다. 접근하는 드라이버는 필요한 경우 정지할 수 있을 정도로 거리를 둔 지점에서 항복선 또는 교차의 한 지점을 볼 수 있어야 합니다.
- 에이프런
- 에이프런 또는 오버런 영역은 대형 차량을 유도하기 위해 중앙 교통섬 밖에 제공된 구역입니다. 에이프런의 외부 제한은 270도를 회전하는 일반 차량의 오프사이드 제한입니다. 주: 일부 국가에서는(특히 미국) 에이프런이 교통섬의 일부로 간주되는 반면, 다른 국가에서는(특히 영국) 교통섬과 주 순환 영역 사이로 간주됩니다. 접합에서 에이프런은 중앙 교통섬 밖에 놓인다고 간주됩니다. 즉, 에이프런 지름이 교통섬 반지름보다 작아서는 안 됩니다.
- 에이프런 지름
- 에이프런 또는 오버런 영역의 지름입니다. 에이프런 지름은 중앙 교통섬 지름보다 작아서는 안 됩니다.
- 화물차턱의 폭
- 에이프런 폭은 에이프런의 반지름과 중앙 교통섬의 반지름 간의 차이입니다. 에이프런 폭은 0보다 작아서는 안 됩니다.
- 암
- 접합에 연결하는 도로입니다. 일부 국가에서는 다리로 알려져 있습니다.
- AutoDrive
- 대상 점(커서)을 이동함에 따라 지정된 위치에서 경로가 자동으로 계산되는 차량 주행 수단입니다.
- 축 간격
- 구성요소의 전면 또는 후면에 있는 다중 축 그룹의 인접 축 간 거리
- 진입 시 역방향 가시성
- 왼쪽으로 주행할 때 원형교차로로 진입 시 오른쪽에 대한 가시성 또는 오른쪽으로 주행할 때 원형교차로로 진입 시 왼쪽에 대한 가시성입니다.
- 기준선
- 기준선은 주차 구역 행의 뒤를 따라 지나는 선입니다.
- 승강장 표시
- 승강장 표시는 차의 원하는 위치를 기술하는 데 사용되는 그려진 선, 기호 및 해칭을 포함합니다.
- 승강장 스타일
- 표시, 안전 구역, 기호 및 주차 액세서리의 각기 다른 구성을 승강장 스타일이라고 합니다.
- 승강장 기호
- 승강장 기호는 승강장 이용 등을 표시하기 위해 사용되는 승강장 내에 그려진 그래픽입니다.
- 곡관 교통섬
- 곡관 교통섬은 주차 구역 행이 방향을 변경하는 위치에 놓입니다.
- 혼합점
- 접합 암 선형이 기존 도로와 결합하거나 혼합하는 지점입니다.
- 캐스터 스티어링
- 고정 축 그룹의 부분이지만 자유롭게 회전하는 휠입니다. 자가조향 휠이라고도 합니다.
- 차량 전향 이동 가능 범위
- 예상 회전을 참고하십시오.
- 중앙 교통섬(또는 간단히 교통섬)
- 원형교차로의 중심에서 횡단할 수 없는 교통섬으로, 270도 회전 차량에 대한 일반 오프사이드 제한입니다. 주: 일부 국가(특히 미국)에서는 중앙 교통섬을 대형 트럭의 오버런 영역을 포함하는 것으로 간주합니다. 접합은 이 오버런 영역을 중앙 교통섬을 벗어나는 것으로 간주합니다.
- 중심선 오프셋
- ICD에서 암 선형의 접선과 교통섬의 중심 간 수직 거리입니다. 접선이 진입 도로의 반대쪽에 있는 교통섬의 중심을 통과하는 경우에는 오프셋이 양수입니다. 따라서 일반적으로 중심선 오프셋이 커질수록 진입 굴곡도 커지고, 그 반대의 경우도 마찬가지입니다.
- 순환 경로 반지름
- 중심 교통섬을 중심으로 최고속 차량 경로의 최소 반지름입니다.
- 순환 경로 속도
- 순환 경로 반지름에 해당하는 속도입니다.
- 회전 차도 중앙분리대
- 내접 원과 중앙 교통섬 사이 중앙로를 주행하는 차량의 경로입니다.
- 회전 폭
- 내접 원 반지름에서 교통섬 반지름을 뺀 값입니다. 주: 원하는 물리적 차량 경로 제한은 일반적으로 이 범위 이내입니다.
- 충돌 각도
- 진입 각도를 참고하십시오.
- 크램프 각도
- 최대 휠 각도에 대한 용어로, 미국 소방부에서만 사용되는 것 같습니다. 휠 컷을 참고하십시오.
- 연석 선
- 물리적 연석의 도로측 가장자리를 나타내는 선입니다.
- 연석 오프셋
- 연석 선이 정의 선과 간격을 두는(외부) 거리입니다.
- 연석 측면 번호 매기기
- 승강장 옆에 승강장 번호를 지정하는 것을 연석 측면 번호 매기기라 합니다.
- 연석 간 회전 원 반지름
- 차량의 휠이 회전할 수 있는 최소 원의 반지름입니다. 이것은 전체 스티어링 잠금이 적용될 때 발생한다고 가정됩니다.
- 컷인 점
- 요소의 스파인이 그려지는 호에 접하는 점입니다.
- 컷인 반지름
- 컷인 점이 가로지르는 호의 반지름입니다.
- 정의 선
- 도로 제한을 나타내는 가상 선입니다. 실제 연석 선은 이 선과 일치하거나 일치하지 않을 수 있습니다.
- 다음 암까지의 거리
- 다음 암까지의 거리는 현재 암의 항복선 오프사이드 끝에서 그 다음 암에 있는 중앙 분리대 표식기 또는 교통섬의 가장 가까운 점(둘 중 가장 가까운 것)까지의 직선 거리입니다.
- 선 끌기
-
경로를 확장하는 데 사용될 수 있는 차량의 맨 앞쪽 및 맨 뒤쪽 그립에서 그려진 선입니다. 이러한 선의 길이는 차량 크기에 따라 달라지고 선을 끌 수 있습니다.
- 견인
- 축 또는 축 그룹에 단단하게 부착되어 있는 단단한 견인 막대입니다. 막대 및 축은 장치의 몸체에 막대 및 축을 연결하는 킹핀을 중심으로 단일 도면요소로 회전합니다.
- 견인 연결 각도
- 견인과 연결된 트레일러 스파인이 견인의 축 피벗에서 대응하는 각도입니다.
- 견인 길이
- 견인 길이는 관련 축 그룹의 회전 중심에서 견인의 실제 끝까지 측정됩니다. 원격 끝에 있는 커플링은 차량 추적에서 개별적으로 정의해야 합니다.
- DXF 파일
- DXF는 Drawing Exchange Format(도면 교환 형식) 즉, 서로 다른 CAD 시스템 간에 데이터를 전송하는 데 사용된 텍스트 파일 형식을 나타냅니다.
- 동적 편집
- 대상 점(및/또는 중간 점)의 그립을 새 위치로 끌어서 경로를 편집합니다. 그립을 놓으면 경로가 자동으로 업데이트됩니다.
- 유효 고정 축
- 유효 고정 축은 고정 축 그룹과 동일한 효과를 차량 스윕 경로에 미치는 단일 축입니다. 유효 고정 축은 수축된 축 및 자가조향 축의 효과가 고려된 그룹의 중심입니다.
- 유효 플레어 길이
-
유효 플레어 길이는 아래 다이어그램에서 거리 1'입니다.
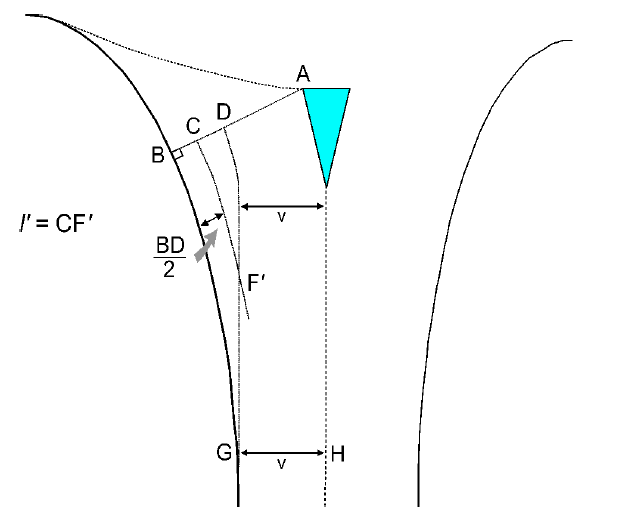 주: 미니 원형교차로 분석을 위해 ARCADY에서 사용한 유효 플레어 길이는 표준 원형교차로의 경우와 동일한 방식으로 구성되었지만, 접근 도로 절반 폭 대신 최소 접근 도로 절반 폭을 사용하는 평균 유효 플레어 길이입니다.
주: 미니 원형교차로 분석을 위해 ARCADY에서 사용한 유효 플레어 길이는 표준 원형교차로의 경우와 동일한 방식으로 구성되었지만, 접근 도로 절반 폭 대신 최소 접근 도로 절반 폭을 사용하는 평균 유효 플레어 길이입니다. - 유효 전면 축
- 정의된 실제 전면 축 그룹과 효과가 동등한 단일 축입니다.
- 유효 전면 축 오프셋
- 참조 기준에서 유효 전면 축의 오프셋입니다. 유효 축 위치가 참조 기준 뒤에 있는 경우에는 양수입니다.
- 유효 전면 궤도 폭
- 경로 계산에서 사용될 전면 휠의 외부 면 간 거리입니다.
- 유효 후면 축
- 정의된 실제 후면 축 그룹과 효과가 동등한 단일 축입니다.
- 유효 후면 축 오프셋
- 참조 기준에서 유효 후면 축의 오프셋입니다. 유효 축 위치가 참조 기준 뒤에 있는 경우에는 양수입니다.
- 유효 후면 궤도 폭
- 경로 계산에서 사용될 후면 휠의 외부 면 간 거리입니다.
- 유효 조정되는 축
- 유효 조정되는 축 오프셋은 지정된 조정되는 축 그룹과 동일한 효과를 차량 스윕 경로에 미치는 단일 축입니다. 유효 조정되는 축은 조정되는 축 그룹의 가장 바깥쪽 축 즉, 전면 축 그룹에서 전향으로 가장 멀고 후면 축 그룹에서 뒤로 가장 먼 축입니다.
- 유효 휠베이스
- 유효 전면 축과 유효 후면 축 사이의 거리입니다.
- 끝 교통섬
- 끝 교통섬은 주차 구역 행 끝에 있는 비주차 영역입니다.
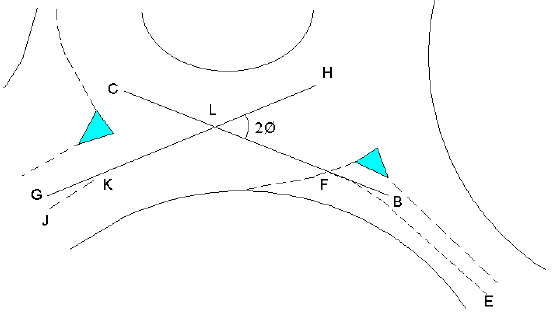
- 진입 각도
- 진입 각도 또는 충돌 각도, F(Phi)는 진입 스트림과 순환 스트림 사이 각도에 대한 기하학적 프록시입니다. 진입 각도는 중앙분리대 순환 경로에 대하여 진입 및 출구 접선이 교차하는지 여부에 따라 두 가지 방법 중 하나로 계산됩니다.
진입 및 출구 접선이 순환 차도 중앙분리대 '내부'에서 교차할 때 진입 각도는 진입 접선과 교차 지점의 순환 차도 중앙분리대 접선 간 각도입니다.
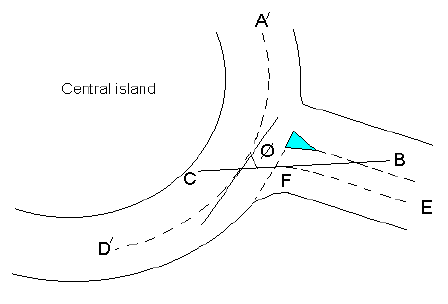
진입 및 출구 접선이 순환 차도 중앙분리대 '외부'에서 교차할 때 진입 각도는 진입 접선과 출구 접선 간 각도의 절반입니다.
- 진입 구석 연석 선 거리
- 진입 구석 연석 선 거리는 항복선의 오프사이드 끝으로 수직 상승하는 진입 연석의 점에서 시계 방향으로 다음 암의 출구 폭 측정 오프사이드 끝으로 수직 상승하는 연석을 따르는 점까지 측정된 진입 구석 연석 선의 길이입니다.
- 진입 편각
- 차량이 원형교차로의 진입과 협상하기 위해 직선 경로에서 이탈해야 하는 범위입니다.
- 진입 경로 반지름
- 최고속 차량 경로 즉, 진입 항복선과 가까운 최소 반지름입니다. 최대 진입 경로 반지름을 참고하십시오.
- 진입 접선
- 진입 경로와 항복선의 교차에서 진입하는 차량의 경로 접선입니다.
- 출구 경로 반지름
- 최고속 차량 경로 즉, 출구와 가까운 최소 반지름입니다.
- 진입 경로 속도
- 진입 경로 반지름에 해당하는 차량 속도입니다.
- 출구 경로 속도
- 출구 경로 반지름에 해당하는 속도입니다.
- 출구 접선
- 출구 경로와 ICD의 교차로에서 나가는 차량의 경로 접선입니다.
- 외피
- 최대 몸체 또는 휠 이동을 나타내는 단일 선입니다. 차량 몸체의 경우 외피는 몸체의 임의 점 이동의 외부 한계입니다. 휠의 경우 외피는 휠 이동의 외부 한계입니다.
- 출구 오버턴
- 출구 오버턴은 일반적으로 차량이 다시 돌아서 회전을 종료하기 전에 회전을 시작하는 점을 지나 계속 주행하는 경우입니다(즉, 회전 시작을 지연함). 법선 경로에서의 측면 편차는 출구 오버턴 거리입니다.
- 최고속 선
- 최고속 선은 가능한 빨리 접합을 통과하는 차량의 주행 경로 중심선입니다. 최고속 선은 다른 방법으로 다양한 표준으로 정의되지만, 일반적으로 진입, 출구 및 교통섬에 있는 경로의 정점에서의 최소 오프셋이 있습니다. 또한 간혹 지정된 시작 및 종료 위치도 있습니다.
- 다섯 번째 휠
- 킹핀이라는 세미-트레일러의 핀에 연결하는 트랙터의 편자 모양 커플링 장치입니다.
- 플레어 차선
- 차량 이동을 관리하는 데 사용되는 원형교차로로의 진입에 추가된 추가 차선입니다.
- 따라가기
- 필수 경로를 폴리선으로 지정하고 차량이 이 선을 따를 수 있게 하는 차량 주행 수단입니다.
- 전향 회전 가시성
- 순환 영역 주위 가시성입니다.
- 전향 최고속 경로 가시성
- 최고속 경로의 진입 차량에서 다음 암의 최고속 진입 경로에 있는 충돌 점까지의 가시성입니다.
- 진입 시 전향 가시성
- 왼쪽으로 주행할 때 원형교차로로 진입 시 왼쪽에 대한 가시성 또는 오른쪽으로 주행할 때 원형교차로로 진입 시 오른쪽에 대한 가시성입니다.
- 그립
- 객체를 선택할 때 나타나는 작은 정사각형입니다. 마우스를 사용하여 그립을 선택하고 이동할 수 있습니다.
- 헤어핀 표시
- 입구에서 연결된 두 개의 동일한 측면 선으로 구성된 주차 구역 표시 유형입니다.
- 헤드업 디스플레이
- 사용자가 수행 중인 작업에서 시선을 딴 데로 돌리지 않고도 볼 수 있는 데이터의 디스플레이입니다.
- HUD
- 헤드업 디스플레이를 참고하십시오.
- 승강장 번호 매기기에서
- 승강장 번호 매기기에서는 각각의 표시된 주차 구역 내에 승강장 번호가 매겨질 경우입니다.
- 독립 보기
- 각각 자체 턴테이블을 가지는 장치에 따라 배열된 다중 연결식 보기입니다. 텐덤 축으로도 알려져 있습니다. Pendel 축을 참고하십시오.
- 내접 원
- 회전 폭의 외부 한계를 나타내는 정의 선입니다.
- 중간 그립
- 대상 점 사이 경로를 따라 표시되어 경로를 더 쉽게 편집할 수 있는 임시 편집 그립입니다. 중간 그립이 선택된 경우 중간 그립은 대상 점이 됩니다.
- 교차로 시선 거리
- 이전 암에서 들어가는 교통 및/또는 이미 회전하는 교통에 대한 가시성입니다.
- 킹핀
- 다섯 번째 휠이라는 트랙터에 있는 편자 쉐이프의 커플링 장치에 연결하는 세미-트레일러의 핀입니다.
- 차선
- 동일한 방향으로 주행하는 차량의 차선 사이 선입니다.
- 도면층
- AutoCAD 도면 내에서 객체를 함께 그룹화하는 수단입니다. 레이어의 특성(예: 가시성)은 레이어가 포함하는 객체와 독립적으로 제어될 수 있습니다. MicroStation에서 대등한 항목인 레벨을 참고하십시오.
- Level
- MicroStation 도면 내에서 객체를 함께 그룹화하는 수단입니다. 레이어의 특성(예: 가시성)은 레이어가 포함하는 객체와 독립적으로 제어될 수 있습니다. AutoCAD에서 대등한 항목인 레이어를 참고하십시오.
- 연결 비율
- 연결 비율은 장치의 한 쪽 끝에서 다른 쪽 끝의 축 그룹에 적용되는 연결 또는 휠 각도의 비율입니다. 비율은 각도 또는 각도의 접선 용어로 지정될 수 있습니다. 산술 용어에서 연결이 각도 기준을 따를 경우 연결 비율은 다음과 같습니다.
LinkageProportion = LinkedAngle/PrimaryAngle
연결이 접선 기준을 따를 경우 연결 비율은 다음과 같습니다.
LinkageProportion = tan(LinkedAngle)/tan(PrimaryAngle)
후자가 더 일반적인 연결 형식이며, 이 경우 모든 주요 각도에 대해 유효 컷인 점 오프셋은 고정됩니다.
- Loci
- Locus의 복수형입니다. Locus를 참고하십시오.
- 잠금
- 스티어링 각도. 즉, 최대 왼쪽 잠금은 왼쪽으로 회전할 때 가능한 최대 스티어링이고 오른쪽 잠금은 오른쪽으로 회전할 때 최대 스티어링입니다.
- 락-투-락 시간
- 락-투-락 시간은 차량의 드라이버가 한 방향의 최대 각도(전체 잠금)에서 단일 연속 이동으로 반대 방향의 최대 각도(전체 잠금)로 스티어링을 회전하는 데 걸리는 시간입니다.
- Locus
- 공간에서 이동 점의 경로입니다. 차량 추적 컨텍스트에서 휠 트랙 또는 몸체 정점의 경로입니다. 차량 추적에서는 복수형 Loci라고 합니다.
- 수동 드라이브
- 화면에 표시된 통제 중첩을 사용하는 차량을 주행하는 수단입니다. 차량은 통제 중첩의 커서 위치에 따라 전향, 반향, 좌향 및 우향으로 이동합니다.
- 최대 견인 연결 각도
- 허용된 최대 견인 연결 각도입니다.
- 최대 진입 경로 반지름
- 최고속 경로 시작 오프셋의 도로 선형에 접하고 회전 영역의 오프셋 원에 접하게 그릴 수 있는 최대 반지름입니다. 진입 경로 반지름을 참고하십시오.
- 최대 진입 경로 속도
- 최대 진입 경로 반지름에 해당하는 속도입니다.
- 최대 휠 각도
- 그룹의 임의 휠 즉, 전면 및 후면에 있는 휠의 최대 각도입니다. 최대 휠 각도는 일반적으로 맨 안쪽 축의 내부 휠이지만 그룹의 축 폭이 다를 경우 달라질 수 있습니다. 크램프 각도 및 휠 컷을 참고하십시오.
- 최소 접근 절반 폭
- 최종 접근 100미터 이내 아무 곳에서나 측정된 최소 접근 절반 폭입니다.
- 최소 컷인 반지름
- 차량이 최대 스티어링 각도에서 회전할 때 컷인 점이 지나는 호의 반지름입니다.
- 모델 설정
- 지정된 차량이 특정 상황에서 동작하는 방식을 제어하는 기준입니다. 예를 들어, 허용 가능한 잠금 속도에 하한 제한을 둘 수 있습니다.
- 인접
- 해당 지역에 맞게 설계된 표준 승용차의 승객에 가장 가까운 측면입니다.
- Object Enabler
- 차량 추적 경로 도면요소와 같은 타사 도면요소를 재생할 수 있지만 편집할 수 없는 AutoCAD 애드온입니다.
- 오프셋 외피
- 추가 여유가 추가된 최대 몸체 또는 휠 이동의 외피입니다. 오프셋 외피는 안전 여유 또는 여유 여백을 나타낼 수 있습니다.
- 오프사이드
- 해당 지역에 맞게 설계된 표준 승용차의 드라이버에 가장 가까운 측면입니다.
- 오버런 영역
- 에이프런을 참고하십시오.
- 오버턴
- 차량이 일시적으로 반대 방향으로 회전하거나(측면 오버턴) 회전에서 출구를 지연시키는(출구 오버턴) 코너의 차량 컷인을 줄이는 방법입니다.
- 오버턴 각도
- 오버턴(측면 또는 출구)을 수행할 때 오버턴 각도는 비오버턴 조작을 수행할 경우 동일한 차량이 주행하는 경로에서 휠의 각도 편차입니다.
- 페가수스 교차
- 신호 보행자/승마 교차를 참고하십시오.
- 펠리칸 교차
- 신호 보행자 교차를 참고하십시오.
- Pendel 축
- 애커맨 축과 매우 흡사한 방식으로 회전하는(즉, 회전 중심에서 가장 멀리 있는 축이 가장 넓은 반지름을 따라감) 장치를 교차하고 나란히 따라서 배열되는 다중 연결 보기입니다.
- 예상 회전
- 예상 회전은 마지막으로 표시된 위치에서의 차량 경로 제한과 선택되지 않은 가상 위치에서의 몸체 또는 휠 외피 제한을 표시하는 AutoDrive 기능입니다. "차량 전향 이동 가능 범위"로도 알려져 있습니다.
- 주 축
- 그룹의 맨 안쪽 축. 즉, 전면 축 그룹의 맨 뒤쪽 축 및 후면 축 그룹의 맨 앞 축입니다.
- 개인 정보 게시
- 개인 정보 게시는 인증되지 않은 사람이 주차 구역을 사용하지 못하도록 하기 위해 사용됩니다.
- 종단
- 프로파일은 치수를 포함한 차량 전체의 측면도 또는 평면도를 표시할 수 있는 차량 추적 객체입니다.
- 종단 뷰
- 종단 뷰는 지면 프로파일을 그리드에 그래프 선으로 표시할 수 있는 AutoCAD Civil 3D 객체입니다. 자세한 내용은 AutoCAD 문서를 참조하십시오.
- 퍼핀 교차
- 신호 보행자 교차를 참고하십시오.
- R1
- 진입 경로 반지름을 참고하십시오.
- R1 최대
- 최대 진입 경로 반지름을 참고하십시오.
- R2
- 순환 경로 반지름을 참고하십시오.
- R3
- 출구 경로 반지름을 참고하십시오.
- R4
- 270도 회전 경로 반지름을 참고하십시오.
- R5
- 90도 회전 경로 반지름을 참고하십시오.
- 레일 휠
- 휠의 레일 이탈 방지를 위해 일반적으로 내부 플랜지를 달고 레일에서 운행하도록 설계된 휠입니다.
- 수축된 축
- 존재하지만 도로 표면과 접촉하지 않는 축입니다. 수축된 축은 차량 추적이 유효 축 위치를 계산할 경우 무시됩니다.
- 안전 기둥
- 안전 기둥은 차량이 멈추지 않고 더 주행하지 않도록 하기 위해 주차 구역 끝에 배치될 수 있습니다.
- 안전 구역
- 안전 구역은 특수 요구사항을 충족하기 위해 제공된 추가 공간 영역으로, 구역 측의 중심에서 입구선까지 측정됩니다.
- 스크립트
- 전향 10미터, 좌회전 30도, 5미터 지속 등과 같은 명령을 실행하여 차량을 주행하는 수단입니다.
- 보조 스티어링
- 각도를 통제할 수 있지만 차량의 주 스티어링은 아닌 회전 축 그룹입니다. 이 축은 다른 축에 연결되거나 독립적으로 통제될 수 있습니다.
- 보조 스티어링 각도
- 보조 스티어링 축의 중심에서 가상 휠의 각도입니다. 보조 스티어링을 참고하십시오.
- 자가조향
- 고정 축 그룹의 부분이지만 자유롭게 회전하는 휠입니다. 캐스터라고도 합니다.
- 구분 선
- 반대 방향으로 주행하는 교통 차선 사이의 선입니다.
- 서비스 유형
- 주차 영역의 다른 사용을 서비스 유형이라고 합니다.
- 측면 오버턴
- 측면 오버턴은 회전을 하기 전에 차량이 반대쪽 잠금으로 짧은 거리를 회전하기 시작할 때입니다. 일반 경로에서의 측면 편차는 측면 오버턴 거리입니다.
- 신호 보행자 교차
- 교통을 정지시키는 신호가 있는 보행자 교차입니다. 신호는 탐지기를 사용하여 보행자가 접근하거나 명시적인 보행자 통제가 있을 수 있을 때 표시등을 자동으로 변경할 수 있습니다. 영국에서 탐지기 유형은 퍼핀 교차로, 비탐지기 유형은 펠리칸 교차로 알려져 있습니다.
- 신호 보행자/주기 교차
- 신호 통제를 사용하여 교통을 중지시키는 보행자 또는 주기 액세스용으로 특별히 설계된 교차입니다. 영국에서는 투칸 교차로 알려져 있습니다.
- 신호 보행자/승마 교차
- 신호 통제를 사용하여 교통을 중지시키는 보행자 또는 승마 액세스용으로 특별히 설계된 교차입니다. 영국에서는 페가수스 교차로 알려져 있습니다.
- 분리
- 분리는 진입 및 출구 도로 정의 선과 내접 원의 경계로 형성됩니다.
- 분리 교통섬
- 분리는 특히 보행자 교차가 있는 경우, 분리 교통섬을 포함할 수 있습니다. 분리 교통섬의 실제 제한은 일반적으로 분리 내부입니다.
- 스티어링 각도
- 통제 축 또는 커플링의 중심에서 가상 휠의 각도입니다.
- 스텁 축
- 한 끝에서만 휠을 이동하는 축입니다.
- 스텁 축 길이
- 스텁 축 길이는 피벗 점에서 휠 그룹의 중심까지 측정됩니다.
- T-표시
- 각 인접 주차 구역 간 입구에 그려진 T로 구성된 주차 구역 표시 유형입니다. T의 다리는 구역의 측면을 따라 짧은 거리를 아래로 진행하고 교차는 입구 선을 따라 일부를 진행합니다.
- 텐덤 축
- 독립적 보기를 참고하십시오.
- 대상 점
- 차량이 주행해야 하는 통과 점입니다.
- 투칸 교차
- 신호 보행자/주기 교차를 참고하십시오.
- 추적 점
- 추적 점은 지정된 대상 점을 통과해야 하는 차량의 점입니다. 추적 점은 AutoDrive를 사용할 때 이동하고 배치하는 차량의 지점이며 따라가기 드라이브 모드에서 선을 따라가는 점이기도 합니다.
- 타이어 달린 휠
- 타이어가 장착된 휠입니다.
- 비신호 보행자 교차
- 신호 통제가 없는 보행자 교차입니다. 영국에서는 지브라 교차로 더 잘 알려져 있습니다.
- V1
- 진입 경로 속도를 참고하십시오.
- V1 최대
- 최대 진입 경로 속도를 참고하십시오.
- V2
- 순환 경로 속도를 참고하십시오.
- V3
- 출구 경로 속도를 참고하십시오.
- V4
- 270도 회전 경로 속도를 참고하십시오.
- V5
- 90도 회전 경로 속도를 참고하십시오.
- 차량 클래스
- 주차 영역을 사용하는 차량은 유사한 주차 요구사항을 포함하는 차량으로, 클래스로 그룹화됩니다.
- 벽 간 회전 원 반지름
- 차량의 몸체가 회전할 수 있는 최소 원의 반지름입니다. 이것은 전체 스티어링 잠금이 적용될 때 발생한다고 가정됩니다.
- 휠 컷
- 최대 휠 각도에 대한 용어(미국 소방부에서만 사용되는 것 같음)입니다. 크램프 각도를 참고하십시오.
- 휠 지름
- 타이어의 외부 면 지름입니다.
- 휠 중지
- 차량이 멈추지 않고 더 주행하지 않도록 하기 위해 승강장 끝에는 휠 중지가 배치됩니다.
- 휠 트랙
- 축에 있는 휠의 외부 면 간 거리입니다.
- 지브라 교차
- 비신호 보행자 교차를 참고하십시오.