접점 유형
HumanIK는 접점 유형이라는 캐릭터의 손과 발의 바닥 접점을 관리하는 네 가지 다른 모드를 제공합니다. 선택한 접점 유형에 따라 보조 속성 세트에서 제공하는 측정을 사용하여 HumanIK가 캐릭터의 손이나 발의 윤곽을 작성하는 방법이 결정됩니다.
사용 가능한 접점 유형 및 각 유형이 해당 보조 속성을 해석하는 방법이 아래에 설명되어 있습니다. 접점 유형 설정에 대한 자세한 내용은 손과 발 접점 설정을(를) 참조하십시오.
접점 속성 값 선택
조직에서 Autodesk MotionBuilder에 액세스할 수 있는 사용자나 아티스트의 경우 이 Autodesk MotionBuilder를 사용하여 다음 섹션에서 설명하는 속성에 최적의 값을 결정하는 것이 가장 좋습니다. MotionBuilder는 뷰포트에서 마커의 위치를 렌더링할 수 있으므로 바닥 접점 솔버에서 파악한 대로 손과 발의 치수를 쉽게 시각화할 수 있습니다. 또한 HumanIK 바닥 접점 엔진을 MotionBuilder 뷰포트에서 직접 사용하고 설정의 결과를 테스트하여 조정 결과에 대한 시각적 피드백을 바로 얻을 수 있습니다. 따라서 최적의 값을 결정하는 프로세스를 훨씬 더 빠르고 쉽게 수행할 수 있습니다.
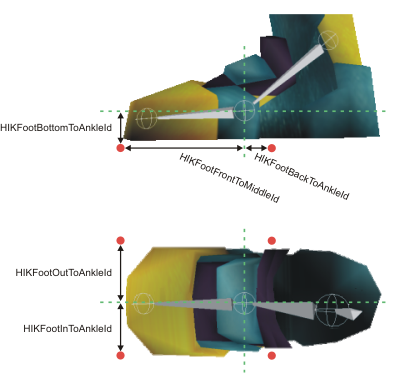
접선 접점 유형
접선 접점 유형을 사용하면 아래 이미지에서 빨간색으로 표시된 것처럼 각 캐릭터의 손과 발이 6개의 마커로 정의됩니다. 이러한 마커의 위치는 캐릭터의 팔목이나 손목 관절(LeftAnkleNodeId, RightAnkleNodeId, LeftWristNodeId 및 RightWristNodeId 노드)을 기준으로 지정됩니다.
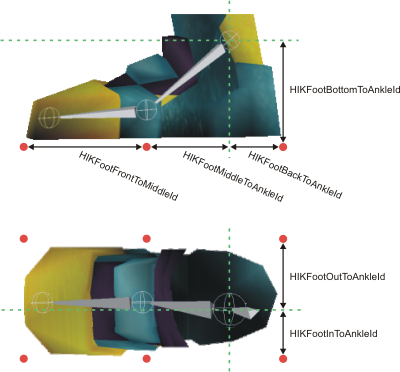
이러한 마커는 두 개의 평면을 정의하는데, 하나는 발바닥 또는 손바닥이며, 다른 하나는 발가락 또는 손가락입니다. 이러한 평면은 발가락이나 손가락 밑(위 이미지에서 가운데 마커의 위치)에서 힌지가 달려 필요한 경우 HumanIK에서 발을 구부릴 수 있도록 합니다. 최상의 결과를 얻으려면 캐릭터의 발가락이나 손가락 바로 아래, 즉 발이나 손이 구부러지는 위치에 이 힌지를 배치해야 합니다. 캐릭터의 손가락 및 발가락이 HumanIK에서 제어하는 개별 관절식인 경우 발가락 및 손가락 접점 설정도 고려해야 합니다. 아래 손과 발 접점 설정을(를) 참조하십시오.
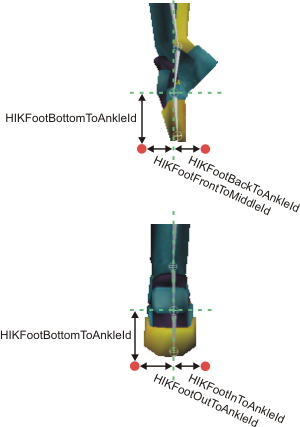
발목 또는 손목 접점 유형
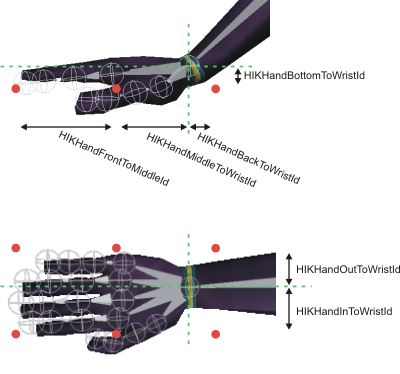
발목 또는 손목 접점 유형을 사용하면 아래 이미지에서 빨간색으로 표시된 것처럼 각 캐릭터의 손과 발이 4개의 마커로 정의됩니다. 이러한 마커의 위치는 캐릭터의 팔목이나 손목 관절(LeftAnkleNodeId, RightAnkleNodeId, LeftWristNodeId 및 RightWristNodeId 노드)을 기준으로 지정됩니다.
이러한 마커는 발 또는 손 전체를 나타내는 단일 평면을 정의합니다. 마커가 평면에 닿을 때 발목/손목이 아닌 위치에서는 발 또는 손이 구부러지지 않습니다. 즉, 물갈퀴처럼 단일 오브젝트로 처리됩니다. 이 방법은 HumanIK에서 제어하는 발 또는 손 관절이 없는 캐릭터 및 HumanIK에서 제어하는 개별 관절식 손가락 및 발가락이 없는 캐릭터에 가장 적합합니다.
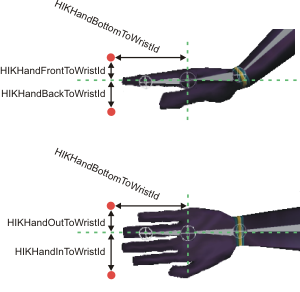
발가락 기저 또는 손가락 기저 접점 유형
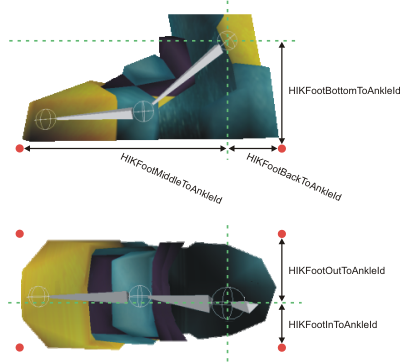
발가락 기저 또는 손가락 기저 접점 유형을 사용하면 아래 이미지에서 빨간색으로 표시된 것처럼 각 캐릭터의 손과 발이 4개의 마커로 정의됩니다. 이러한 마커의 위치는 캐릭터의 발이나 손 관절(LeftFootNodeId, RightFootNodeId, LeftHandNodeId 및 RightHandNodeId 노드)을 기준으로 지정됩니다.

이러한 마커는 캐릭터의 발 또는 손 관절 앞에서 발 또는 손의 앞 부분을 나타내는 단일 평면을 정의합니다. 그러나 이 방법을 사용하면 캐릭터의 발목 또는 손목이 여전히 평면을 통과합니다. 따라서 이 방법은 네 발 달린 동물의 뒷다리 또는 발가락으로 걷는 캐릭터에 가장 적합합니다(예: 뒷발의 앞부분으로만 지면을 딛는 개).
캐릭터에 HumanIK에서 제어하는 발 또는 손 관절이 없는 경우 마커의 위치가 대신 발목 및 손목 관절(LeftAnkleNodeId, RightAnkleNodeId, LeftWristNodeId 및 RightWristNodeId 노드)을 기준으로 결정되므로 이 방법이 위에서 설명한 손목/발목 접점 유형과 기능적으로 같게 됩니다.
발굽 접점 유형
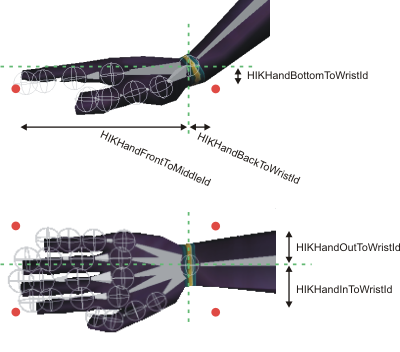
발굽 접점 유형을 사용하면 아래 이미지에서 빨간색으로 표시된 것처럼 각 캐릭터의 손과 발이 4개의 마커로 정의됩니다. 이러한 마커의 위치는 캐릭터의 발이나 손 관절(LeftFootNodeId, RightFootNodeId, LeftHandNodeId 및 RightHandNodeId 노드)을 기준으로 지정됩니다.
이러한 마커는 발 끝 또는 손 끝을 나타내는 단일 평면을 정의합니다. 이 방법은 마지막 발 골격이 지면에 거의 수직인 캐릭터에 가장 적합합니다(예: 발굽이 있는 동물 또는 발레리나 춤 en pointe(위 그림에 표시된 것처럼 뾰족한 발가락 사용)). 이 방법의 캐릭터는 일반적으로 HumanIK에서 제어하는 개별 관절식 발가락이나 손가락이 없습니다.
이 접점 유형의 마커 중 하나가 지면에 닿으면 HumanIK는 다른 마커도 지면에 닿도록 발목/손목 또는 발/손 관절을 회전하려고 시도합니다. 이 동작은 발굽이 있는 캐릭터에게 좀 더 안정된 보행을 하게 해주는 경향이 있습니다.
캐릭터에 HumanIK에서 제어하는 발 또는 손 관절이 없는 경우 마커의 위치가 대신 발목 및 손목 관절(LeftAnkleNodeId, RightAnkleNodeId, LeftWristNodeId 및 RightWristNodeId 노드)을 기준으로 결정됩니다.
 다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.
다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.