저항
저항은 최종 솔루션에서 원래 각도를 유지하는 관절의 기능을 제어합니다.
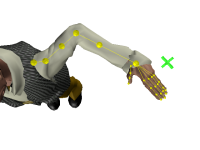
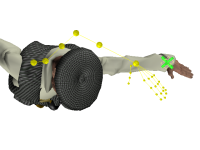

저항 값은 HumanIK 당기기 엔진에서 고려됩니다. 역운동학 솔버를 사용할 때 관절에서 저항 설정의 효과를 확인하려면 IK 솔버에 전달된 초기 HIKCharacterState에서 몸체 부분이 구부러져 있어야 하며 골격 계층의 더 아래쪽 이펙터는 할당된 당기기 및 변환 도달 값의 결과로 굽은 관절을 직선화하기 위해 작용하고 있어야 합니다.
예를 들어 위의 이미지에서 손목이 대상 위치로 변환될 때 팔꿈치의 저항 값이 고려되도록 하려면 당기기 및 변환 도달 값으로 왼쪽 손목을 설정해야 합니다. 마찬가지로 어깨 관절에 대해 설정된 저항 값의 효과를 확인하려면 팔꿈치 또는 손목 이펙터(어깨를 직선화하기 위해 동작하는 모든 이펙터)에 당기기 및 변환 도달 값이 적용되어 있어야 합니다.
저항을 설정할 수 있는 관절
모든 이펙터에 대해 저항 값을 설정할 수는 있지만 다음과 같은 관절에 대해서만 고려됩니다.
- 왼쪽 및 오른쪽 팔꿈치
- 왼쪽 및 오른쪽 어깨
- 왼쪽 및 오른쪽 무릎
- 엉덩이, 가슴, 척추 및 목
 다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.
다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.