要设置非线性静力或瞬态响应分析的“非线性设置”,请在树中“子工况”下的“非线性设置”上单击鼠标右键,然后选择“编辑”。
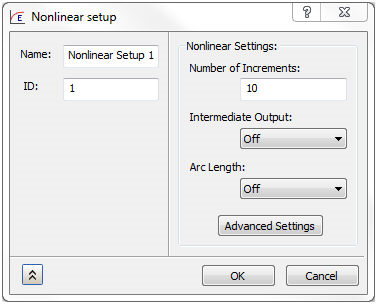
非线性静力或瞬态响应分析
名称:用于标记非线性设置。
ID:用于以数字区分非线性设置。
非线性设置:
- 增量数:可在此处输入非线性分析的增量数。解算器必须将总载荷拆分为此增量数。不应将此与迭代混淆。非线性求解算法可能需要多次进行迭代来求解增量。
-
中间输出:
- 打开:指定保存中间输出(分别保存各收敛增量的输出)。
- 关闭:不保存中间输出。
- 全部:当非线性分析平分当前载荷增量时,平分的载荷增量可能是完成的,并因此保存该平分增量的输出文件。
- 弧长:此“打开/关闭”开关可指定在分析突弹跳变非线性问题时所用的弧长方式的用法。
- 高级设置:此按钮包含非线性分析的高级设置。它适用于非线性静力和非线性瞬态分析。
非线性静力参数:这些是高级替代项,并且通常无需更改,除非模型无法收敛且您需要修改。
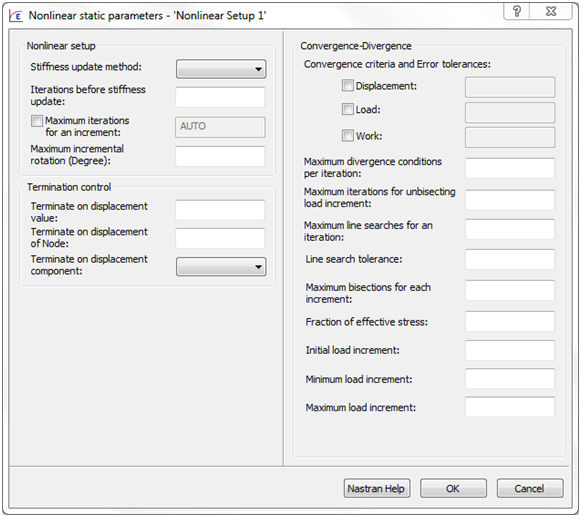
非线性静力分析
-
非线性设置:
- 刚度更新方法:包含“自动”、“半自动”和“迭代”三个选项。
- 自动:程序将根据收敛率自动选择最有效的策略。每一步中收敛所需的迭代次数是通过估算而来。如果 (i) 估算的收敛迭代次数超过 MAXITER 或 (ii) 求解发散,则更新刚度。
- 半自动:程序对各个载荷增量执行基于新载荷的单次迭代,更新刚度矩阵,并且继续完成正常的“自动”选项。
- 迭代:如果选择了“迭代”选项,程序将在 每次 KSTEP 迭代中和收敛时(当 KSTEP ≤ MAXITER)更新刚度矩阵。但是,如果 KSTEP > MAXITER,则从不更新刚度矩阵。请注意,选择“迭代”选项且 KSTEP = 1 时可获得牛顿-拉夫逊迭代策略,选择“迭代”选项且 KSTEP = MAXITER 时可获得改进的牛顿-拉夫逊迭代策略。
- 刚度更新之前的迭代次数:更新刚度矩阵前的迭代次数。
- 增量的最大迭代次数:允许对每个增量进行迭代的最大次数。
- 最大增量旋转(度):最大旋转容差。如果超过此值,求解将进行载荷平分。
- 刚度更新方法:包含“自动”、“半自动”和“迭代”三个选项。
-
终止控制:
- 在位移值上终止:此值用于判断基于位移的分析终止条件。
- 在节点位移上终止:这是基于位移的分析终止条件所用的节点 ID。
- 在位移分量上终止:这是节点的输出坐标系中的位移分量方向。
-
收敛-发散:
- 收敛标准和错误容差:用于判断特定载荷增量收敛的条件。
- 位移:指定基于位移的收敛条件。
- 载荷:指定基于载荷的收敛条件。
- 功:指定基于功的收敛条件。
- 每次迭代的最大发散条件:控制发散求解的条件。
- 取消二等分载荷增量的最大迭代次数:取消二等分载荷增量的最大迭代次数。
- 迭代的最大线搜索次数:控制用于缩放位移以使能量误差最小化的最大线搜索次数。它只能结合线搜索容差使用。
- 线搜索容差:指定线搜索步骤的容差。如果相对能量的绝对值小于此值,则跳过线搜索步骤。
- 每个增量的最大二等分:指定产生严重错误和求解终止前的最大载荷平分次数。
- 有效应力的比例:用于限制非线性材料子增量大小的有有效应力比例。
- 初始/最小/最大载荷增量:用于在自适应载荷增量/收敛方法中定义子工况中的载荷增量的总上边界和下边界。初始载荷增量将替换使用增量数确定的值。当通过 NLPCI 批量数据项指定弧长方法时,这些载荷增量不可用。
- 收敛标准和错误容差:用于判断特定载荷增量收敛的条件。
非线性瞬态参数:这些是高级替代项,并且通常无需更改,除非模型无法收敛且您需要修改。
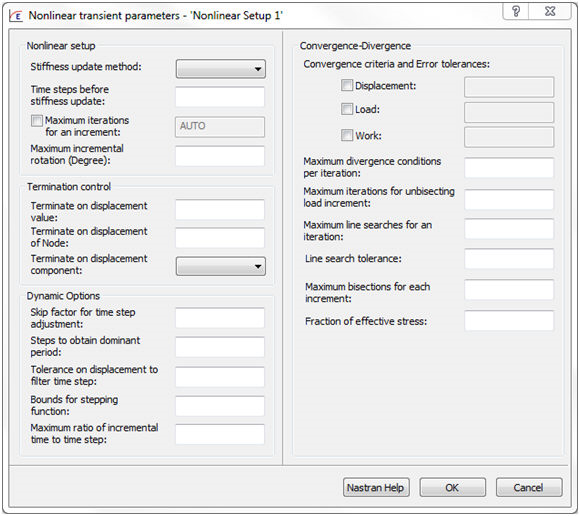
非线性瞬态响应分析
-
非线性设置:
- 刚度更新方法:包含“自动”、“半自动”和“迭代”三个选项。
- 自动:程序将根据收敛率自动选择最有效的策略。每一步中收敛所需的迭代次数是通过估算而来。如果 (i) 估算的收敛迭代次数超过 MAXITER 或 (ii) 求解发散,则更新刚度。
- 半自动:程序对各个载荷增量执行基于新载荷的单次迭代,更新刚度矩阵,并且继续完成正常的“自动”选项。
- 迭代:如果选择了“迭代”选项,程序将在 每次 KSTEP 迭代中和收敛时(当 KSTEP ≤ MAXITER)更新刚度矩阵。但是,如果 KSTEP > MAXITER,则从不更新刚度矩阵。请注意,选择“迭代”选项且 KSTEP = 1 时可获得牛顿-拉夫逊迭代策略,选择“迭代”选项且 KSTEP = MAXITER 时可获得改进的牛顿-拉夫逊迭代策略。
- 刚度更新之前的时间步:更新刚度矩阵之前的时间步数量。
- 增量的最大迭代次数:允许对每个增量进行迭代的最大次数。
- 最大增量旋转(度):最大旋转容差。如果超过此值,求解将进行载荷平分。
- 刚度更新方法:包含“自动”、“半自动”和“迭代”三个选项。
-
终止控制:
- 在位移值上终止:此值用于判断基于位移的分析终止条件。
- 在节点位移上终止:这是基于位移的分析终止条件所用的节点 ID。
- 在位移分量上终止:这是节点的输出坐标系中的位移分量方向。
-
动力学选项:
- 用于时间步长调整的跳跃因子:用于自适应时间步长的时间步长跳跃因子。
- 获取主周期的步骤:用于确定模型的主周期以自动获得恰当的自适应时间步。
- 用于过滤时间步的位移上的容差:如果速度和位移的比小于此值,则不执行时间步调整。
- 步进函数的边界:结合时间步使用以确定调整的时间步。
- 增量时间与时间步的最大比率:用于定义调整的时间步大小的上下边界。
-
收敛-发散:
- 收敛标准和错误容差:用于判断特定载荷增量收敛的条件。
- 位移:指定基于位移的收敛条件。
- 载荷:指定基于载荷的收敛条件。
- 功:指定基于功的收敛条件。
- 每次迭代的最大发散条件:控制发散求解的条件。
- 取消二等分载荷增量的最大迭代次数:取消二等分载荷增量的最大迭代次数。
- 迭代的最大线搜索次数:控制用于缩放位移以使能量误差最小化的最大线搜索次数。它只能结合线搜索容差使用。
- 线搜索容差:指定线搜索步骤的容差。如果相对能量的绝对值小于此值,则跳过线搜索步骤。
- 每个增量的最大二等分:指定产生严重错误和求解终止前的最大载荷平分次数。
- 有效应力的比例:用于限制非线性材料子增量大小的有效应力比例。
- 收敛标准和错误容差:用于判断特定载荷增量收敛的条件。