Utilisez la contrainte Position de manière à ce qu'un objet suive la position d'un objet cible ou la position moyenne de plusieurs objets.
Les contraintes de position alignent les différents éléments du robot.
La contrainte Position requiert un objet contraint et un ou plusieurs objets cibles. Une fois affecté, l'objet est contraint en fonction de la position de l'objet cible. L'animation de la position de la cible force l'objet contraint à suivre.
Cibles et poids multiples
Un objet contraint peut être influencé par plusieurs objets cibles. Si vous utilisez plusieurs cibles, chacune d'entre elles a une valeur Poids qui définit la portée de son influence sur l'objet contraint, par rapport aux autres cibles.
La valeur Poids ne s'avère utile (et disponible) que dans le cas de cibles multiples. Une valeur de 0 signifie que la cible n'a aucune influence. Toute valeur supérieure à 0 force la cible à influencer l'objet contraint, en fonction des paramètres Poids des autres cibles. Par exemple, une cible ayant une valeur Poids de 80 a deux fois plus d'influence qu'une cible ayant une valeur Poids de 40.
Par exemple, si une sphère est soumise à une contrainte Position entre deux cibles et que la valeur de poids de chaque cible est égale à 100, la sphère maintient une distance égale entre les deux cibles, qu'elles soient en mouvement ou non. Si une des valeurs de poids est nulle et l'autre égale à 50, la sphère n'est influencée que par la cible dont la valeur est la plus élevée.
Procédures
Pour affecter une contrainte Position :
-
 Sélectionnez l'objet à contraindre.
Sélectionnez l'objet à contraindre. - Choisissez le menu Animation
 Contraintes Contrainte Position.
Contraintes Contrainte Position. Une ligne élastique s'étend de l'objet contraint au curseur de la souris, ce qui indique qu'un objet cible est requis.
- Cliquez sur l'objet cible.
Pour accéder aux paramètres de la contrainte Position du groupe de fonctions Mouvement :
- Sélectionnez l'objet soumis à une contrainte de position.
- Dans le groupe de fonctions Mouvement
 panneau déroulant Paramètres PRE, cliquez sur le bouton Position.
panneau déroulant Paramètres PRE, cliquez sur le bouton Position. Les paramètres de la contrainte Position figurent dans le panneau déroulant Contrainte Position.
Pour éditer les valeurs de poids :
- Sélectionnez l'objet contraint.
- Dans le groupe de fonctions Mouvement panneau déroulant Paramètres PRE, cliquez sur le bouton Position.
Les paramètres de la contrainte Position figurent dans le panneau déroulant Contrainte Position.
- Cliquez sur une cible dans la liste.
- Utilisez la double flèche ou tapez une valeur numérique pour définir le poids.
Pour animer les valeurs de poids :
- Sélectionnez l'objet contraint.
- Dans le groupe de fonctions Mouvement panneau déroulant Paramètres PRE, cliquez sur le bouton Position.
Les paramètres de la contrainte Position figurent dans le panneau déroulant Contrainte Position.
- Cliquez sur une cible dans la liste.
- Activez

- Utilisez la double flèche ou tapez une valeur numérique pour définir le poids.
Exemple : pour affecter une contrainte Position avec deux cibles et modification des poids :
- Dans la fenêtre Dessus, créez une sphère, une boîte et un cylindre de telle sorte que la boîte se trouve entre la sphère et le cylindre.
- Sélectionnez la boîte, affectez la contrainte Position, puis cliquez sur la sphère pour la désigner en tant que cible.
- Affectez de nouveau la contrainte Position à la boîte (en cliquant sur le cylindre en tant que cible cette fois-ci).
La boîte est maintenant soumise à une contrainte de position entre les deux cibles.
- Dans la vue de dessus, déplacez
 la sphère.
la sphère. Vous remarquerez que la boîte maintient une distance égale entre la sphère et le cylindre. Cela est dû au fait que les valeurs de poids des deux cibles sont égales. Les valeurs par défaut sont de 1,00. Si la sphère avait une valeur de poids supérieure à celle du cylindre, elle influencerait la boîte plus que le cylindre.
- Pour modifier les valeurs de poids, sélectionnez la boîte.
- Accédez au groupe de fonctions Mouvement et affichez le panneau déroulant Contrainte Position.
- Cliquez sur le nom du cylindre dans la liste des cibles.
- Avec la double flèche Poids, changez la valeur de 50 à 20.
Notez que plus la valeur diminue, plus la boîte se rapproche de la sphère.
- Dans la fenêtre Dessus. sélectionnez le cylindre et déplacez-le.
- Dans la fenêtre Dessus, sélectionnez la sphère puis déplacez-la.
Notez que la sphère influence davantage le mouvement de la boîte que le cylindre.
Interface
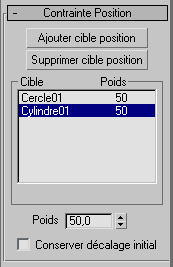
Lorsque vous avez affecté une contrainte de position, vous pouvez accéder à ses propriétés à partir du panneau déroulant Contrainte Position du groupe de fonctions Mouvement. Dans ce panneau déroulant, vous pouvez ajouter ou supprimer des cibles, affecter des poids et animer les valeurs de poids des cibles.
- Ajouter cible position
- Ajoute un nouvel objet cible qui aura une influence sur la position de l'objet contraint.
- Supprimer cible position
- Supprime la ou les cibles sélectionnées. Une fois supprimée, la cible n'influence plus l'objet contraint.
- [Liste Cible]
- Affiche les cibles et leur poids.
- Poids
- Affecte et anime une valeur Poids pour l'objet sélectionné.
- Conserver décalage initial
- Conserve la distance initiale entre l'objet contraint et l'objet cible. Ainsi, l'objet contraint ne peut pas s'accrocher au pivot de l'objet cible. Cette option est désactivée par défaut.