Le système de coordonnées local est le système de coordonnées associé à l'objet sélectionné.
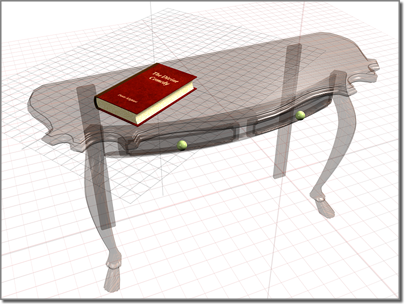
Un livre dans l'espace objet repose sur une table dans l'espace univers. Le livre a maintenant son propre système de coordonnées local.
A chaque objet correspond un centre local et un système de coordonnées, tels qu'ils sont définis par l'emplacement et par l'orientation du point de pivot de l'objet. La combinaison du centre local et du système de coordonnées permet de définir l'espace occupé par l'objet.
La direction des axes des X, des Y et des Z de l'objet dépend des transformations en cours de celui-ci. S'oppose au système de coordonnées universel.
Vous pouvez voir la différence entre les deux systèmes de coordonnées lorsque vous faites pivoter un objet involontairement, par exemple, lorsque vous faites tourner la roue d'un modèle de voiture autour d'un axe universel au lieu de l'axe local de l'objet. La roue se détache immédiatement en décrivant un grand arc de cercle car le centre de la rotation se trouve au niveau de l'origine des coordonnées universelles.
Pour faire pivoter la roue correctement, passez d'abord au système de coordonnées local à l'aide de la liste déroulante de la barre d'outils. La roue tourne ensuite autour de son propre moyeu, qui correspond à l'origine de ses coordonnées locales.