Si vous travaillez avec des données de capture de mouvements et que vous souhaitez insérer des données d'un nuage de points dans 3ds Max pour ensuite mapper le mouvement sur une Ossature CAT, cette rubrique peut vous être utile. Au lieu d'un didacticiel, il s'agit d'un exemple de résolution de ce problème.
Il s'agit d'un exercice de configuration des contraintes en vue de résoudre un problème intégré complexe. Les contraintes sont directionnelles. En d'autres termes, si A est contraint à B, B ne peut pas faire référence à A. L'incapacité des contraintes à prendre en charge les relations circulaires impliquent que vous devez adopter une approche en couches pour résoudre le problème.
Le résultat est un ensemble d'os animés dans lequel la position et la rotation des articulations sont correctes. Une méthode simple pour résoudre ce problème consiste à le découper en deux parties plus simple, les positions et les rotations, et de les résoudre séparément. La position d'un os ne dépend ni des autres os du squelette, ni de la rotation d'aucun autre os.
CAT simplifie la résolution de ce problème.
- L'outil Capturer animation facilite le mapping de l'Ossature CAT sur les os. Chaque structure peut contenir des décalages. Ceux-ci vous permettent d'ajuster de façon interactive la pose de l'Ossature CAT au moment où le mouvement est mappé sur l'ossature.
- Avec une colonne procédurale, il n'est pas nécessaire de définir chaque os de la colonne vertébrale. Selon les données de position et d'orientation du bassin, de la cage thoracique et de la tête, la colonne procédurale de CAT peut interpoler les vertèbres avec précision.
- Avec le système CI de CAT, vous pouvez contraindre des os d'ossature CAT sur l'ossature importée et laisser le logiciel gérer la solution CI. La fonction de redirection signifie que même si les jambes du personnage sont très droites et que l'Ossature CAT possède des jambes plus longues ou plus courtes que celles d'origine, la pose de l'Ossature CAT sera adaptée aux données.
Exemple de scène
Les illustrations suivantes présentent le processus de mapping d'une Ossature CAT sur les données importées d'un nuage de points.
Nuage de points
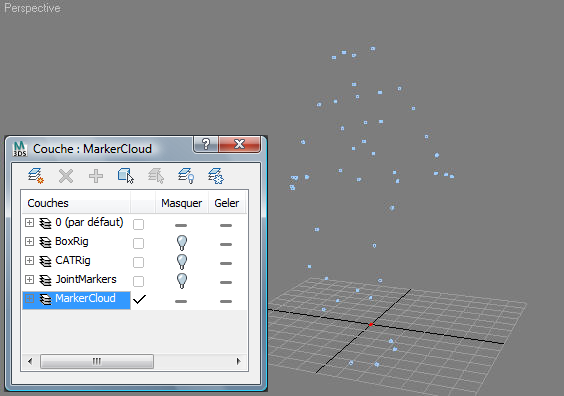
Les nuages de données de capture de mouvements d'origine
Position des connexions
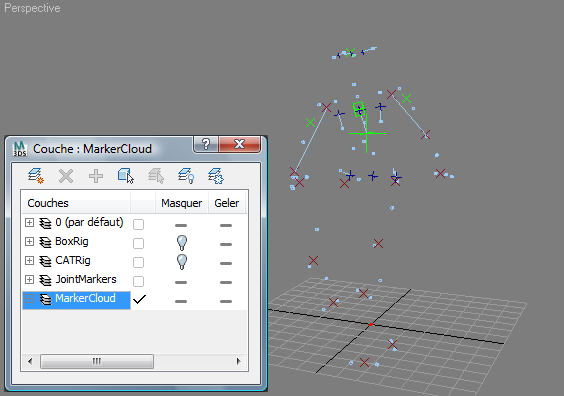
La première couche est destinée à la génération des positions des connexions dans le nuage, à l'aide de contraintes Point. Les positions des connexions sont simplement des contraintes Position pondérées. Elles sont donc assez faciles à configurer. Les croix rouges du fichier de scène représentent les assistants de position des connexions de base.
Un groupe de trois assistants Point est utilisé pour définir l'orientation du bassin en fonction des marqueurs voisins. Une configuration identique est utilisée pour gérer l'orientation de la cage thoracique et de la tête. Il s'agit des points bleus sur l'illustration.
Ossature boîte
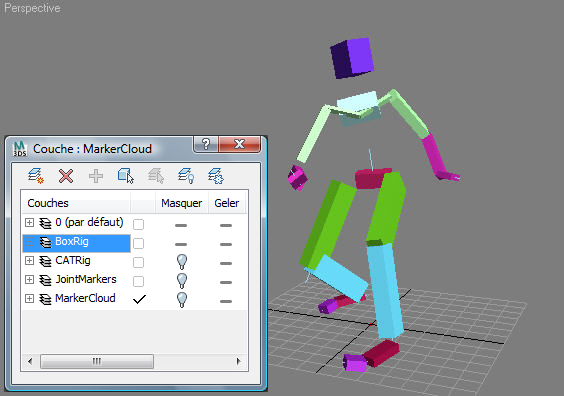
La deuxième couche est la BoxRig qui définit les angles des connexions. Les boîtes sont contraintes à la position des connexions et les contrôleurs Observation définissent les rotations. Notez que la position exacte de la plupart des os n'est pas importante. Par exemple, les articulations des genoux se déplacer par rapport l'os de la hanche. Mais quand ces données sont mappées sur l'Ossature CAT, le système IK de cette dernière nettoie le mouvement et les emplacements des articulations.
Ossature CAT
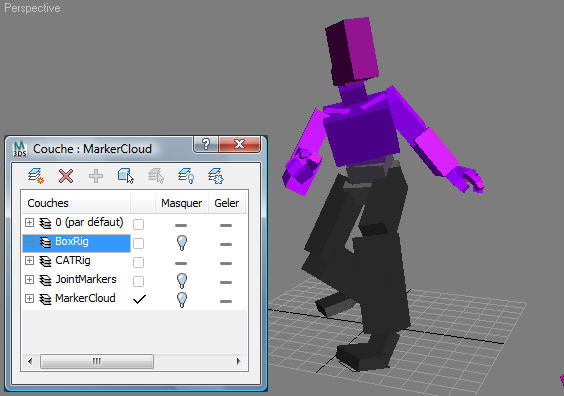
L'Ossature CAT a été mappée sur la BoxRig à l'aide de l'outil Animation.