![]()
-
Biped を選択 >
 [モーション](Motion)パネル > [Biped]ロールアウト >
[モーション](Motion)パネル > [Biped]ロールアウト >  ([足跡モード](Footstep Mode)) > [足跡を作成](Footstep Creation)ロールアウト >
([足跡モード](Footstep Mode)) > [足跡を作成](Footstep Creation)ロールアウト >  ([歩く](Walk)) >
([歩く](Walk)) >  ([複数の足跡を作成](Create Multiple Footsteps)) > [複数の足跡を作成: 歩く](Create Multiple Footsteps: Walk)ダイアログ ボックス
([複数の足跡を作成](Create Multiple Footsteps)) > [複数の足跡を作成: 歩く](Create Multiple Footsteps: Walk)ダイアログ ボックス
このダイアログ ボックスは、[モーション](Motion)パネルの[足跡を作成](Footstep Creation)ロールアウトで[歩く](Walk)の足並みを選択し、[複数の足跡を作成](Create Multiple Footsteps)をクリックすると表示されます。
手順
階段を歩いて上り下りするには:
- [最初のステップ](First Step)領域内の[歩幅 (高さ)](Actual Stride Height)を 0 以外の値に設定します。値が 0 よりも大きいと階段を上り、0 よりも小さいと階段を下ります。
Biped をその場で歩かせるには:
- [最初のステップ](First Step)領域内の[歩幅設定 (長さ)](Parametric Stride Length)を 0 に設定します。
Biped を後ろ向きに歩かせるには:
- [最初のステップ](First Step)領域内の[歩幅設定 (長さ)](Parametric Stride Length)の値を 0 以下に設定します。
この場合も、[歩幅設定 (長さ)](Parametric Stride Length)の絶対値が歩幅の長さになります。
Biped の歩行の速度を徐々に上げるには:
- [タイミング](Timing)領域内の[補間](Interpolate)をクリックします。
[最後のステップ](Last Step)領域内のコントロールが有効になります。
- [最後のステップ](Last Step)領域内の[次の足跡までの時間](Time To Next Footstep)に、[最初のステップ](First Step)領域内の[次の足跡までの時間](Time To Next Footstep)よりも小さい値を設定します。
値は、いずれかの領域または両方の領域で調整できます。[最後のステップ](Last Step)領域の値を[最初のステップ](First Step)領域の値より小さい値に設定することが重要です。
インタフェース
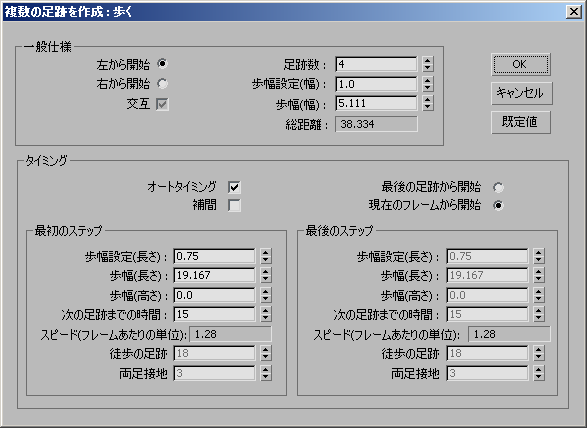
[一般](General)領域
- 左から開始足跡のシーケンスを左足から開始します。
- 右から開始足跡のシーケンスを右足から開始します。
- 交互
- 右の足跡と左の足跡が交互に作成されます。[歩く](Walk)足並みを選択すると、常に[交互](Alternate)が選択されます。[交互](Alternate)は、[走る](Run)または[ジャンプ](Jump)の足並みを選択した場合のみ解除できます。
- 足跡数
- 新しく作成する足跡の数を指定します。
- 歩幅設定(幅)
- 歩幅の幅を、骨盤の幅の割合で設定します。値を 1.0 に設定すると、歩幅は骨盤の幅と等しくなります。値を 3.0 に設定すると、幅の広いよたよたとした足取りになります。この設定を変更すると、[歩幅 (幅)](Actual Stride Width)の値が自動的に変更されます。
歩幅設定では Biped の解剖学的な観点からパラメータを記述し、歩幅(幅)では 3ds Max の単位で値を記述します。
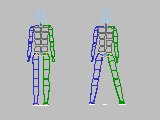
歩幅(幅) = 1 と歩幅(幅) = 3
- 歩幅(幅)
- 歩幅の幅をモデリングの単位で設定します。この設定を変更すると、[歩幅設定 (幅)](Parametric Stride Width)の値が自動的に変更されます。
- 総距離
- 現在の設定を使用したときの足跡の移動距離の合計を表示します。この値は直接変更できません。
- OK
-
現在の設定で足跡を作成します。
- キャンセル
-
足跡の作成をキャンセルします。
- 既定値
-
ダイアログ ボックス内の値を既定値にリセットします。
[タイミング](Timing)領域
- オートタイミング
- タイミング パラメータを自動的に設定します。[オートタイミング](Auto Timing)は、歩行足並みの次のタイミング パラメータに影響します。
- 徒歩の足跡、両足接地
[オートタイミング](Auto Timing)をオンにすると、これらのパラメータは自動的に適切な値に調整されます。足跡シーケンスを制御するには、[歩幅 (長さ)](Stride Length)パラメータと[次の足跡までの時間](Time To Next Footstep)パラメータを調整します。
[オートタイミング](Auto Timing)をオフにした場合、足並みのタイミング パラメータを調整して足跡シーケンスを制御できますが、[次の足跡までの時間](Time To Next Footstep)は変更できません。
- 徒歩の足跡、両足接地
- 補間
- 一連の足並みの加速と減速を制御します。このボックスにチェックマークを付けると、[最後のステップ](Last Step)にあるステップ パラメータが有効になります。
[最初のステップ](First Step)のパラメータの値で開始し、[最後のステップ](Last Step)のパラメータの値で終了する足跡が作成されます。
これら 2 つの間を補間することによって、時間とともに変化する一連の足跡が作成されます。
[補間](Interpolate)がオフの場合、[最後のステップ](Last Step)のパラメータは灰色表示されます。すべての足跡は、[最初のステップ](First Step)のパラメータのみを使用して作成されます。
- 最後の足跡から開始 新しく作成した足跡を、既存の足跡シーケンスの最後に追加します。
- [現在のフレームから開始](Start at Current Frame) 新しく作成した足跡を、既存の足跡シーケンスの後にある現在のフレームに挿入します。これにより、足跡が再開する前に間隔が作成されます。
[最初のステップ](First Step)領域と[最後のステップ](Last Step)領域
- 歩幅設定(長さ)
- 新しい足跡の歩幅の長さを、Biped の脚の長さの割合で設定します。既定値の 0.75 では、通常のプロポーションの平均歩幅になります。
値を 1.0 にすると、歩幅の長さは脚の長さと同じになり、次のステップに到達するために Biped が少しストレッチします。値を 0.0 にすると、Biped はその場歩きをします。歩幅の長さを負の値にすると、Biped は後ろ向きに歩きます。
Biped が後ろ向きに歩く場合、単に前向きの動きが逆になるのではなく、正しい足の状態のシーケンスが維持され、足の指、踵の順に地面に接します。
[歩幅設定 (長さ)](Parametric Stride Length)を調整すると、[歩幅 (長さ)](Actual Stride Length)の値が自動的に変更されます。
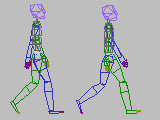
歩幅(長さ) = 0.75 と歩幅(長さ) = 1
- 歩幅(長さ)
- 新しい足跡の歩幅の長さを 3ds Max の単位で設定します。
上記の[歩幅設定 (長さ)](Parametric Stride Length)と同じ規則が適用されます。
[歩幅 (長さ)](Actual Stride Length)を調整すると、[歩幅設定 (長さ)](Parametric Stride Length)の値が自動的に変更されます。
- 歩幅(高さ)
- 足跡間の上昇または下降を設定します。このパラメータを使用すると、坂や階段を上り下りする足跡のセットを作成できます。
[歩幅 (高さ)](Actual Stride Height)の値は、新しく作成する各足跡の高さの差を単位で表します。正の値を設定すると上昇、負の値を設定すると下降します。

歩幅(高さ) = 5 単位
- 次の足跡までの時間
- 足の動きの各サイクルに対するフレーム数を指定します。サイクルは、足が地面に触れるフレームで開始し、足が上がったり動いたりする間継続し、足が再び地面から離れるフレームで終了します。このパラメータは、[オートタイミング](Auto Timing)がオンの場合のみ有効になります。
- スピード(フレームあたりの単位)
- Biped がフレームあたりで移動する単位数を表示します。このパラメータは、他のパラメータの変更に応じて変化しますが、直接調整することはできません。
その下の 2 つのパラメータは、[オートタイミング](Auto Timing)がオフの場合のみ有効になります。
[オートタイミング](Auto Timing)の代わりにこれらのパラメータを使用して、一連の足跡に対する前向きモーションの速度を制御できます。ただし、これらのパラメータは両方とも足跡が接地している時間に影響するため、これらを使用して歩行を遅くすると、止まったり動いたりして、ためらうような歩行になります。
- 徒歩の足跡
- 歩行中に各足跡が接地するフレーム数を指定します。
数値を大きくすると、Biped の各足が接地する時間が長くなり、結果として歩行モーションが遅くなります。
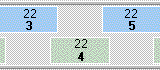
足跡 3 から 5 は、それぞれ 22 フレーム接地します。
- 両足接地
- 歩行中に両足が同時に接地するフレーム数を指定します。
数値を大きくすると、各歩行サイクルで両足が接地する時間が長くなり、結果として歩行モーションが遅くなります。

点線は両足接地の時間を示します(6 フレーム)。