例: IK ジョイント チェーンを作成する
例: インバース キネマティクス ジョイント チェーンを作成する
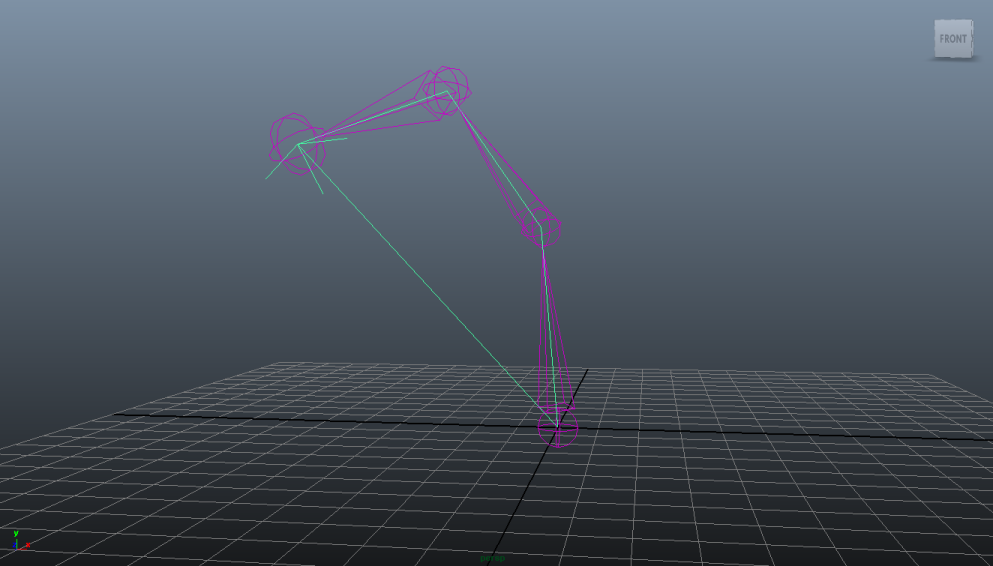
プログラムの概要: 次のプラグイン コードで作成される新しいコマンドは、インバース キネマティクス ジョイント チェーンのジョイントの数を定義する 1 つの引数「length」を受け取ります(例: cmds.myJointChain(length=4))。ジョイント チェーンは円弧内に作成され、その端にはインバース キネマティクス(IK)ハンドルと結び付けられた IK エフェクタが配置されます。IK ハンドルを使用すると、IK エフェクタのみを使ってジョイント チェーン全体を操作できます。IK エフェクタを移動すると、コンストレイントされた相互の方向を維持しながら、ジョイントの他の部分も移動します。
注:インバース キネマティクス ハンドルの作成を容易にするために、MDagModifier.commandToExecute() を使用していることに注意してください。MEL コマンド リファレンスは『Maya ユーザ ガイド』 > 「Technical Documentation」 > 「Commands」にあります。
注:このサンプル プラグイン スクリプトでは、OpenMayaAnim.MFnIkJoint()を使用します。これは Maya Python API 2.0 には公開されていないため、このサンプル プラグインの 2.0 バージョンはありません。
Python API 1.0:
# jointChain.py
import sys
import maya.OpenMaya as OpenMaya
import maya.OpenMayaMPx as OpenMayaMPx
import maya.OpenMayaAnim as OpenMayaAnim
kPluginCmdName = 'myJointChain'
# The length of the chain.
kLengthFlag = '-l'
kLengthLongFlag = '-length'
defaultLength = 3
jointDistance = 5 # the distance between two joints
jointOrientation = 20 # degrees.
##########################################################
# Plug-in
##########################################################
class JointChainCommand(OpenMayaMPx.MPxCommand):
def __init__(self):
''' Constructor. '''
OpenMayaMPx.MPxCommand.__init__(self)
def parseArgs(self, pArguments):
''' Parses the command's arguments. '''
# Set the default chain length in case there are no arguments.
global defaultLength
self.length = defaultLength
# Obtain the flag value, if the flag is set.
argData = OpenMaya.MArgParser( self.syntax(), pArguments )
if argData.isFlagSet( kLengthFlag ):
# Get the value associated with the flag as an integer.
flagValue = argData.flagArgumentInt( kLengthFlag, 0 )
# Make sure this value is larger than the default length.
if flagValue > defaultLength:
self.length = flagValue
def doIt(self, pArguments):
''' Command Execution. '''
# Parse the passed arguments.
self.parseArgs( pArguments )
# Create an instance of an MDagModifier to keep track of the created objects,
# and to undo their creation in our undoIt() function.
self.dagModifier = OpenMaya.MDagModifier()
# Create the joint MObjects we will be manipulating.
self.jointObjects = []
for i in range(0, self.length):
if i == 0:
# The first joint has no parent.
newJointObj = self.dagModifier.createNode( 'joint' )
else:
# Assign the new joint as a child to the previous joint.
newJointObj = self.dagModifier.createNode( 'joint', self.jointObjects[i-1] )
# Keep track of all the joints created.
self.jointObjects.append( newJointObj )
# Create the inverse kinematic effector MObject. The effector is a child of the last joint object.
# The [-1] index is a Python-specific way of referring to the last item in a list.
self.effectorObj = self.dagModifier.createNode( 'ikEffector', self.jointObjects[-1] )
# Invoke the command's redoIt() function to actually create and manipulate these objects.
self.redoIt()
def redoIt(self):
''' Create and manipulate the nodes to form the joint chain. '''
# Perform the operations enqueued within our reference to MDagModifier.
self.dagModifier.doIt()
#=======================================
# JOINT MANIPULATION
#=======================================
# We can now use the function sets on the newly created DAG objects.
jointFn = OpenMayaAnim.MFnIkJoint()
for i in range( 1, len( self.jointObjects ) ):
jointFn.setObject( self.jointObjects[i] )
# We set the orientation for our joint to be 'jointOrientation' degrees, to form an arc.
# We use MFnIkJoint.setOrientation() instead of MFnTransform.setRotation() to let the
# inverse-kinematic handle maintain the curvature.
global jointOrientation
rotationAngle = OpenMaya.MAngle( jointOrientation, OpenMaya.MAngle.kDegrees )
jointFn.setOrientation( OpenMaya.MEulerRotation( rotationAngle.asRadians(), 0 , 0, OpenMaya.MEulerRotation.kXYZ ) )
# We translate the joint by 'jointDistance' units along its parent's y axis.
global jointDistance
translationVector = OpenMaya.MVector( 0, jointDistance, 0 )
jointFn.setTranslation( translationVector, OpenMaya.MSpace.kTransform )
#=======================================
# IK HANDLE MANIPULATION
#=======================================
# We will use the MEL command 'ikHandle' to create the handle which will move our joint chain. This command
# will be enqueued in our reference to the MDagModifier so that it can be undone in our call to MDagModifier.undoIt().
# Obtain the DAG path of the first joint.
startJointDagPath = OpenMaya.MDagPath()
jointFn.setObject( self.jointObjects[0] )
jointFn.getPath( startJointDagPath )
# Obtain the DAG path of the effector.
effectorDagPath = OpenMaya.MDagPath()
effectorFn = OpenMayaAnim.MFnIkEffector( self.effectorObj )
effectorFn.getPath( effectorDagPath )
# Enqueue the following MEL command with the DAG paths of the start joint and the end effector.
self.dagModifier.commandToExecute( 'ikHandle -sj ' + startJointDagPath.fullPathName() + ' -ee ' + effectorDagPath.fullPathName() )
# We call MDagModifier.doIt() to effectively execute the MEL command and create the ikHandle.
self.dagModifier.doIt()
def undoIt(self):
''' Undo the command. '''
# This call to MDagModifier.undoIt() undoes all the operations within the MDagModifier.
# Observe that the number of calls to MDagModifier.undoIt() does not need to match the number of calls to MDagModifier.doIt().
self.dagModifier.undoIt()
def isUndoable(self):
''' This function must return True to indicate that it is undoable. '''
return True
##########################################################
# Plug-in initialization.
##########################################################
def cmdCreator():
''' Creates an instance of the command. '''
return OpenMayaMPx.asMPxPtr( JointChainCommand() )
def syntaxCreator():
''' Defines the argument and flag syntax for this command. '''
syntax = OpenMaya.MSyntax()
syntax.addFlag( kLengthFlag, kLengthLongFlag, OpenMaya.MSyntax.kDouble )
return syntax
def initializePlugin( mobject ):
''' Initializes the plug-in. '''
mplugin = OpenMayaMPx.MFnPlugin( mobject )
try:
mplugin.registerCommand( kPluginCmdName, cmdCreator, syntaxCreator )
except:
sys.stderr.write( 'Failed to register command: ' + kPluginCmdName )
raise
def uninitializePlugin( mobject ):
''' Uninitializes the plug-in. '''
mplugin = OpenMayaMPx.MFnPlugin( mobject )
try:
mplugin.deregisterCommand( kPluginCmdName )
except:
sys.stderr.write( 'Failed to unregister command: ' + kPluginCmdName )
raise
##########################################################
# Sample usage.
##########################################################
'''
# Copy the following lines and run them in Maya's Python Script Editor:
import maya.cmds as cmds
cmds.loadPlugin( 'jointChain.py' )
cmds.myJointChain( length=4 )
''' 特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。
特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。