反り解析で、成形品の自然な反りに反応して、モデルの剛体運動 (グローバル並進移動と回転) が発生しないように、拘束をモデル ノードに適用します。
注: 一般的な空間の剛体運動は 6 つの構成要素があります (3 つの直交並進移動と 3 つの直交回転)。このことは、モデルに設定する必要がある拘束自由度の最小数も 6 つであることを意味します。実際には、グローバル座標系またはローカル座標系のどちらが、モデリングする物理的状態をより的確にシミュレーションできるかを決定する必要があります。
自動または手動による拘束
ほとんどの場合は、デフォルトによる自動的な拘束を使用して、成形品の一般的な反りを予測できます。
拘束を手動で設定せずに、拘束を自動的に設定した場合、成形品の変位量は「ベスト フィット」手法を使用して測定されます。
多くの場合、反りの自動計算で十分ですが、成形品が特定の条件で使用された場合や、アセンブリで他のオブジェクトに固定されている場合などの反りを予測するために、成形品に手動で拘束を設定することが効果的なことがあります。
アセンブリが原因で発生する変形や応力などを考慮するために、特定のノードに非ゼロ変位拘束を設定する場合があります。これを実行するには、まず、モデルに剛体運動拘束を設定する必要があります。
下図 1 と 2 は、成形品に設定した拘束の種類に応じて、いかに反りシミュレーションが異なるかを示しています。
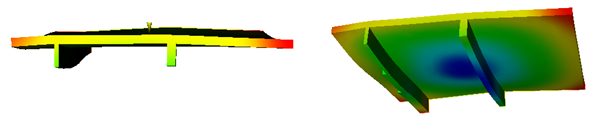
自動拘束による成形品の一般的な変形 (表示倍率=10.00)
特定の拘束を成形品に設定することで、実際の使用条件での成形品の不適切な挙動を早期に予測できます。
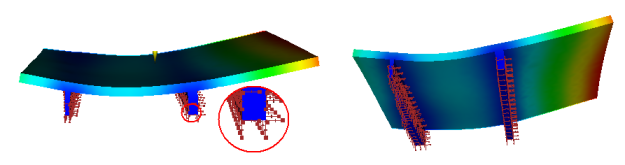
使用時の成形品に適用される拘束のシミュレーションとその拘束による変位(表示倍率=10.00)