FootPlatform은 발에 대한 IK 대상입니다. FootPlatform의 모션은 다리 애니메이션에 필수적인 요소입니다.
-
CATMotion 편집기 >
 계층 패널 > FootPlatform이 속하는 HubGroup 계층 확장 > 편집할 제어기 클릭
계층 패널 > FootPlatform이 속하는 HubGroup 계층 확장 > 편집할 제어기 클릭
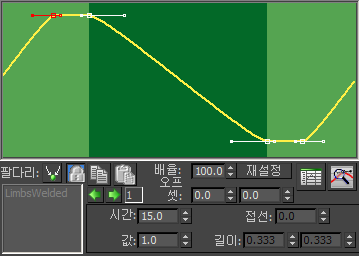
RollPivotPos
CATRig의 FootPlatform에는 발이 언제나 정확한 점을 기준으로 회전하도록 하는 애니메이션된 피벗 위치가 있습니다. RollPivotPos 제어기는 FootPlatform의 X축에서 또는 측면 간의 피벗 위치를 결정합니다.
값이 1.0이면 발 바깥쪽을, 0.0이면 발 플랫폼 안쪽을 나타냅니다.
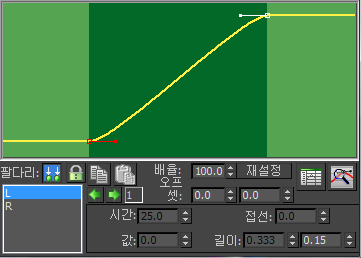
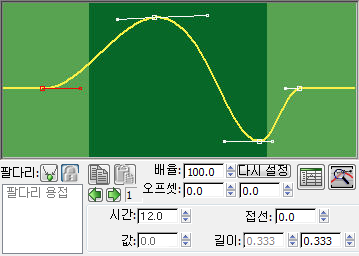
롤
롤 제어기는 해당 길이를 따라 FootPlatform의 회전을 제어합니다.
다음 그림에서 롤은 발이 지면에서 떨어지기 전에 시작하여 발이 다시 지면에 닿은 후에 끝납니다. 이것이 일반적인 시나리오입니다.
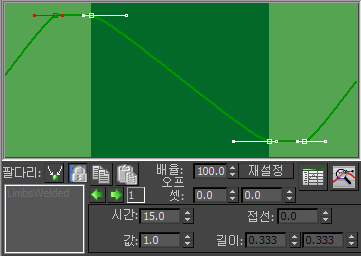
PitchPivotPos
FootPlatform에는 발이 언제나 원하는 점을 기준으로 회전하도록 하는 애니메이션된 피벗 위치가 있습니다. PitchPivotPos는 FootPlatform의 Y축, 즉 해당 길이에서 피벗의 위치를 제어합니다.
값이 0.0이면 피벗이 발 플랫폼의 뒤꿈치에 배치되고, 1.0이면 발가락에 배치됩니다.
사람의 경우 이 설정은 일반적으로 다음 그림과 같이 도약에 대한 발가락(1.0)과 고정에 대한 뒤꿈치(0.0) 사이에서 애니메이션됩니다.
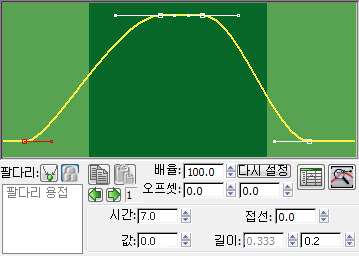
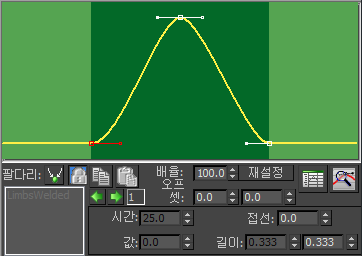
피치
표준 피치 제어기와 같이 FootPlatform 피치는 해당 길이(Y축)에서 FootPlatform의 각도를 제어합니다. 이 피치는 다음 그림과 같이 발이 도약했다가 다시 지면을 누를 때 발의 각도를 제어하는 데 사용됩니다.
FootPush
FootPush는 Y축을 따르는 순환 위치 간격띄우기로, 걷기 주기 중에 FootPlatform을 앞으로 스로우할 수 있도록 합니다.
벗어남
벗어남 제어기는 실제로 WeightShift 제어기와 같으며, FootPlatform의 가로(X축) 위치 주기를 제어합니다.

StepShape
Step모양 제어기는 FootPlatform이 허공에서 이동할 때의 속도를 제어합니다. 즉, FootPlatform 모션의 천천히 들어옴 및 천천히 나감을 제어합니다.