발목 제어기에는 DigitRollAngle, DigitSpreadAngle, DigitCurlAngle, TargetAlign 및 FootBend가 있습니다.
-
CATMotion 편집기 >
 계층 패널 > 발목이 속하는 HubGroup 계층 확장 > 편집할 제어기 클릭
계층 패널 > 발목이 속하는 HubGroup 계층 확장 > 편집할 제어기 클릭
주: 여기서 설명하는 손가락 유형 제어기는 CATMotion 레이어를 만들 때 발목에 손가락이 하나 이상 있는 리그에 대해서만 사용할 수 있습니다(손바닥 및 발목 편집 참조).
DigitRollAngle
DigitRollAngle은 손가락 롤 정도를 제어합니다.
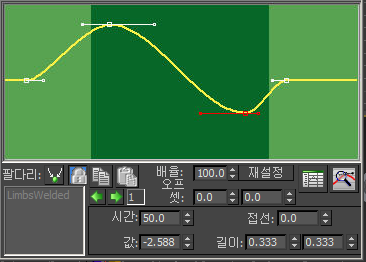
팁: DigitRollAngle은 DigitSpreadAngle과 함께 사용합니다.
DigitSpreadAngle
DigitSpreadAngle은 주기 중에 손가락에 의한 확산 정도를 제어합니다.
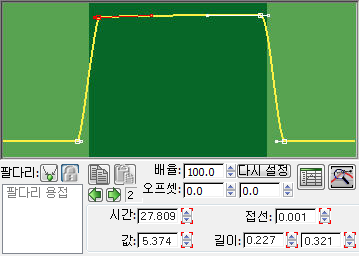
팁: DigitSpreadAngle은 공룡과 같이 발가락으로 걷는 큰 생물을 시뮬레이션하는 데 유용합니다. 발이 도약할 때는 확산이 꺼지고 발이 다시 땅에 닿을 때는 다시 켜지도록 애니메이션합니다.
DigitCurlAngle
DigitCurl 제어기는 주기 중의 손가락 컬링 정도를 제어합니다.
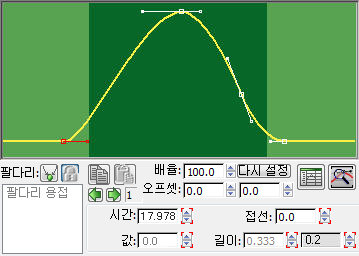
팁: DigitCurl은 도마뱀, 새 등 발톱이 긴 생물의 경우에 특히 유용합니다.
팁: 개별 손가락의 컬링 값을 제어하려면 선택한 손가락의 설정 사양에서 컬링 가중치를 편집합니다.
TargetAlign
TargetAlign은 발목의 피벗점 위치를 제어합니다. 값이 0.0이면 피벗점이 발가락 아래의 둥근 부분(발가락의 기준)에 배치됩니다. 값이 1.0이면 피벗이 발목 관절에 배치됩니다.
팁: 사람의 경우에는 일반적으로 피벗이 도약 시에는 발가락 아래의 둥근 부분에, 고정 시에는 뒤꿈치에 배치됩니다.
대부분의 네발 동물과 같이 발가락으로 걷는 생물의 경우에는 일반적으로 상수 값이 0.0이므로 피벗점이 발가락 아래의 둥근 부분에 유지됩니다.
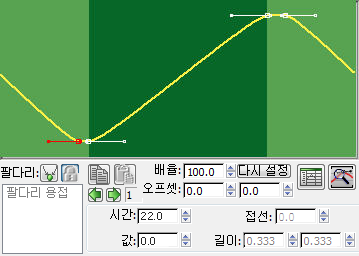
FootBend
FootBend는 발목의 각도를 제어합니다.
팁: 사람을 애니메이션할 때는 발목이 원래 자연스럽게 도약하기 때문에 일반적으로 FootBend가 필요하지 않습니다(단, TargetAlign이 정확해야 함).
팁: 이것은 발가락으로 걷는 생물에 대한 작업을 할 때 가장 유용합니다.