회전 장치 또는 솔리드의 해석에서 상대 참조 프레임(회전 장치와 함께 회전하는 참조 프레임) 내에서 흐름 필드가 계산될 경우 뛰어난 예측 결과를 얻을 수 있습니다. 다양한 회전 속도 및/또는 축을 갖는 여러 회전 장치를 유지하려면 각 회전 장치를 둘러싸는 회전 영역을 작성하는 것이 좋습니다. 그런 다음 이러한 회전 영역을 비회전 영역으로 둘러쌉니다.
다음 스케치에서 각 회전 장치(빨간색)는 원형 유체 영역(녹색)으로 둘러싸입니다. 상자로 둘러싸인 외부 영역은 고정 영역입니다.
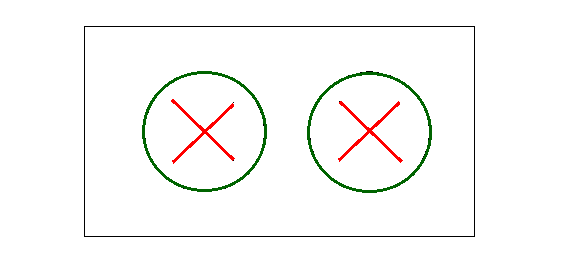
이러한 유체 영역은 둘러싸는 회전 장치와 동일한 각속도로 회전합니다. 회전 영역 내에서 모든 계산은 상대 참조 프레임에서 수행됩니다. 고정 영역 내에서 모든 계산은 관성 참조 프레임에서 수행됩니다.
상대 프레임에서 유체 운동이 계산될 경우 일부 추가 가속이 고려되어야 합니다.
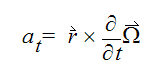
at = 접선 가속
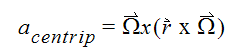
acentrip = 구심 가속
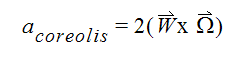
acoreolis = 코리올리 가속
여기서 관성 프레임의 속도는 사용하는 상대 프레임의 속도와 관련이 있습니다.
이러한 추가 운동량 가속 소스 항은 회전 유체 영역에만 필요합니다.
각 시간 수준에서, 회전 구성요소 및 이러한 구성요소를 둘러싸는 유체 메쉬는 몇 도 정도 회전됩니다. 지정된 회전 속도에서 회전 각도는 다음과 같이 계산됩니다.
여기서 회전 속도는 RPM(분당 회전 수) 단위로 지정됩니다. 회전 메쉬가 새 위치에 있을 때 모든 스칼라 수량은 두 메쉬 시스템 간의 기하학적 보간을 사용하여 슬라이딩 메쉬 인터페이스의 회전 측면에서 비회전 측면으로 매핑됩니다. "이류"에 따라 정보가 전송됩니다. 즉, 로터-고정자 인터페이스의 각 플럭싱 면을 조사할 경우 로터에서 고정자로 이동하는 흐름은 흐름 방향으로 수량을 이류합니다. 마찬가지로, 고정자에서 로터로 이동하는 흐름은 고정 메쉬에서 회전 메쉬로 정보를 이류합니다. 슬라이딩 메쉬 구역을 통해 전달되는 운동량을 연결하는 경우 프로세스는 상대 프레임에서 절대 프레임으로 또는 그 반대로 변환할 때 "오메가 곱하기 r" 수량을 추가하거나 빼기 위해 변환이 필요하다는 점을 제외하고 매우 비슷합니다.
회전 장치의 속도를 알 수 없는 경우 각운동량 보존을 사용하여 시간에 따른 각속도를 예측합니다.
이 방정식에서 유압 토크(회전 장치의 표면에 작용하는 압력 및 전단력에서 발생) 및 외부에서 적용된 토크는 회전 장치를 가속하거나 감속합니다. 회전 장치의 관성에는 기호, I가 지정됩니다. 외부 토크가 적용되지 않은 자유 회전 장치의 경우 유도 유압 토크가 사라질 때까지 장치가 가속화됩니다.