Em animação de passos e forma livre, os giros permitem rotacionar as mãos e pés do bípede em vários pontos.
Por exemplo, ao ativar um giro na bola de um pé, você pode rotacionar o pé em torno da bola do pé. As mãos e pés do bípede têm o mesmo número de giros e a localização do giro é similar. Os Giros estão ativados somente se a mão ou pé do biped está em universal ou espaço de coordenadas do objeto. Em um movimento de caminhar, você pode girar no calcanhar primeiro e, em seguida, na bola do pé e finalmente nos dedos. Os Giros são essencialmente extensões da cadeia Cinemática Inversa.
Ao definir uma tecla plantada para a mão, a mão é ancorada no espaço mundial: é possível mover o biped ou a clavícula e a mão permanece plantada. Os Giros nas mãos facilitam para animar mãos e dedos.
Enquanto os giros são utilizados na animação de passos e forma livre, os giros estarão visíveis e acessíveis apenas quando estiver operando no modo de forma livre.
Bípede Cinemática Inversa
Para compreender a manipulação dos membros Cinemática Inversa interativa usando Estúdio do Personagem, é importante distinguir dois tipos de juntas nos membros: primária e secundária.
As juntas primárias são os ombros, cotovelo, quadril e joelhos. Os animais utilizam as juntas primárias para coordenar o posicionamento de mãos e pés, pois estas juntas têm maior influência e flexibilidade em tarefas de posicionamento. Mesmo a colocação dos dedos das mãos e dos pés sobre pontos específicos é tarefa atribuída às juntas primárias.
As juntas secundárias são os punhos, os tornozelos, os dedos das mãos e dos pés. Estas juntas são normalmente utilizadas para agarrar e suportar ao invés de posicionamento, de modo que elas mais frequentemente exercem controle independente do ângulo da junta adequado para uma tarefa específica, tais como rotacionar o pé para levantar os calcanhares durante o caminhar, ou dobrar os dedos em torno de um objeto. Porque estas juntas têm pouca influência na posição do atuador, elas são raramente relacionadas para tarefas de posicionamento. Por exemplo, se você deseja colocar o dedo no nariz, você naturalmente rotacionará somente o ombro e o cotovelo, mantendo seu pulso estacionário.
O Estúdio do Personagem imita o comportamento de Cinemática Inversa do sistemas "naturais". o As juntas primárias são utilizadas para posicionamento Cinemática Inversa, enquanto as juntas secundárias são controladas forma independente e precisa pelo animador. As juntas secundárias não irão rotacionar a não ser que o animador explicitamente as selecione e as rotacione. Entretanto, se um ponto de giro Cinemática Inversa é definido, e os membros são manipulados interativamente, (digamos, que o dedo seja colocado no nariz), somente as juntas primárias se ajustam para satisfazer a restrição Cinemática Inversa. As juntas secundárias permanecem no lugar e nunca "derrapam" em uma Solução de cinemática inversa; elas simplesmente obedecem os valores definidos pelo animador. Porque não há derrapagens para a juntas secundárias, o animador não precisa tediosamente atribuir valores de "tensão" para mantê-los no lugar.
Se um ponto de giro de cinemática inversa tiver sido definido, alguns produtos do Estúdio do Personagem "Cinemática Inversa natural" serão:
- Ao rotacionar interativamente uma junta secundária, as juntas primárias sempre serão ajustadas para manter o giro Cinemática Inversa no local.
- O Estúdio do Personagem "rotações especiais", as rotações do antebraço/panturrilha no eixo X, rotacionam o cotovelo no eixo a partir do ombro até o pulso e rotaciona o joelho no eixo a partir do quadril até o calcanhar. Estas rotações dão ao animador a forma direta para rotacionar interativamente as juntas primárias enquanto mantém o giro Cinemática Inversa no local.
- A conversão de uma parte do um membro de forma interativa para mover o giro Cinemática Inversa irá alterar somente as juntas primárias.
- A rotacão de forma interativa de uma junta primária irá mover o giro Cinemática Inversa consigo.
Após um giro Cinemática Inversa for colocado, a aplicação de 1) e 2) fornecem ao animador controle exato sobre todas soluções possíveis de Cinemática Inversa. Os giros Cinemática Inversa podem ser facilmente movidos ao aplicar 3) e 4). Em geral, não é necessário memorizar estas "regras", porque o sistema funciona em uma maneira intuitiva. Você simplesmente precisa posicionar os giros como desejar, defina a restrição Cinemática Inversa e, a seguir, ajuste precisamente a postura do membro, se desejado, rotacionando as juntas secundárias e usando a rotação de especial para ajustar as juntas primárias.
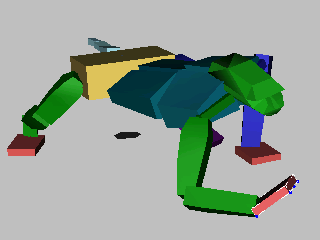
Usando restrições de Cinemática Inversa e giros nas mãos e pés de bípedes permitem que você anime quadrúpedes.
Procedimentos
Para usar o Giro:
 Selecione uma mão ou um pé de um bípede.
Selecione uma mão ou um pé de um bípede.
- Na implementação de informações de chave, clique em
 (Definir chave) e, em seguida, selecione Objeto.
(Definir chave) e, em seguida, selecione Objeto. Neste momento, você também pode selecionar um objeto se você quiser; basta selecionar um objeto não bípede na viewport.
- Ativar Selecionar Giro.
- Selecione um giro em viewports.
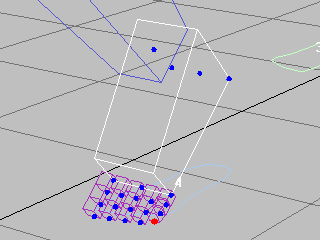
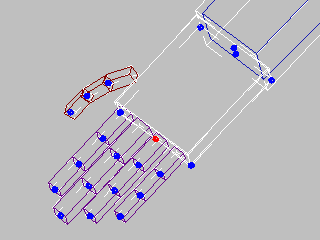
Os Giros são exibidos como pontos vermelhos nas mãos e pés. Use a viewport com estrutura de arame sombreando se você tiver problemas para ver as escolhas.
- Desative Selecionar Giro.
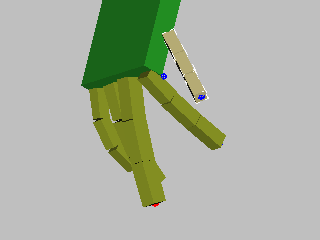
 Rotacione a mão ou o pé em torno do giro selecionado. Dica: Se você achar que você não está rotacionando em torno do giro selecionado, defina duas chaves consecutivas em chaves adjacentes com o mesmo giro.
Rotacione a mão ou o pé em torno do giro selecionado. Dica: Se você achar que você não está rotacionando em torno do giro selecionado, defina duas chaves consecutivas em chaves adjacentes com o mesmo giro.