Se você estiver trabalhando com os dados de captura de movimento e quiser trazer os dados da nuvem de pontos para o 3ds Max e depois mapear o movimento para um CATRig, este tópico poderá ajudar. Em vez de um tutorial, é um exemplo de como resolver esse problema.
Este é um exercício de configuração de restrições para resolver um problema complexo integrado. As restrições são direcionais. Em outras palavras, se A estiver restrito a B, então B não poderá fazer referência a A. A falta de restrições para suportar relações circulares significa que somos obrigados a utilizar uma abordagem em camadas para o problema.
O resultado desejado é um conjunto de ossos com posições de juntas e rotações animadas corretamente. Um modo simples de solucionar esse problema é separar o problema em dois problemas mais simples, posições e rotações, e resolvê-los separadamente. A posição de um osso não depende de outros ossos do esqueleto nem da rotação de qualquer outro osso.
O CAT simplifica a solução para esse problema.
- A ferramenta Capturar animação facilita o mapeamento de CATRig para a montagem de ossos. Cada osso pode conter deslocamentos que permitem ajustar interativamente a pose de CATRig, enquanto o movimento está sendo mapeado para a montagem.
- A espinha procedural torna desnecessária a especificação de cada osso da espinha. Fornecidos os dados de posição e orientação de pélvis, costelas e cabeça, a espinha procedural de CAT pode interpolar as vértebras com precisão.
- Com o sistema de cinemática inversa de CAT, é possível restringir ossos de CATRig para a montagem importada e deixar que o software trate a solução de cinemática inversa. O recurso de redimensionamento indica que mesmo que as pernas do personagem fiquem muito retas e o CATRig tenha pernas que são maiores ou menores do que a perna original, a pose de CATRig será dimensionada para ajustar os dados.
Exemplo de cena
As ilustrações a seguir descrevem o processo de mapeamento de uma CATRig para dados de nuvem de pontos importados.
Nuvem de pontos
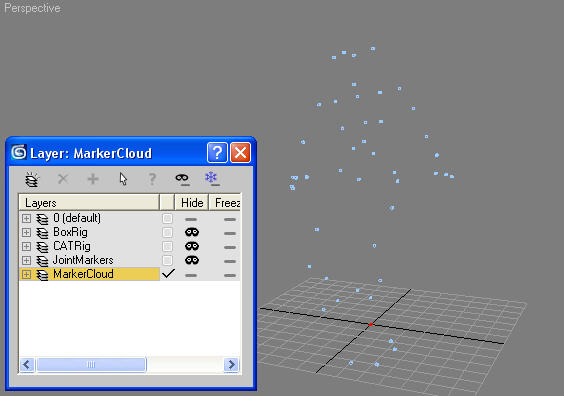
A nuvem de dados de captura de movimento original
Posições das juntas
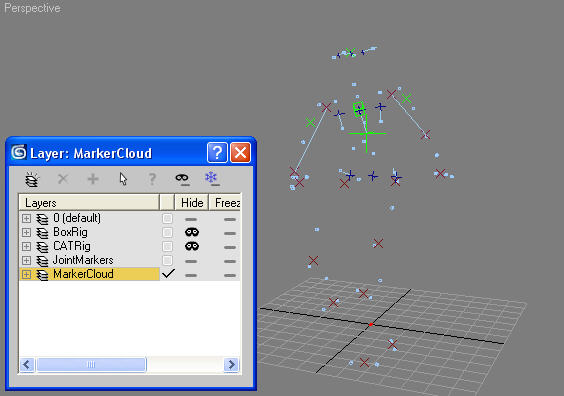
A primeira camada serve para gerar as posições da junta na nuvem usando Restrições de ponto. As posições das juntas são simplesmente restrições de posição ponderadas e, portanto, relativamente fáceis de configurar. As cruzes vermelhas no arquivo de cena representam ajuda da posição da junta básica.
Um grupo de três ajudas de Pontos é utilizado para definir a orientação da pélvis, com base nos marcadores circundantes. Uma configuração idêntica é usada para controlar a orientação das costelas e da cabeça. Estes são os pontos azuis da ilustração.
Box Rig
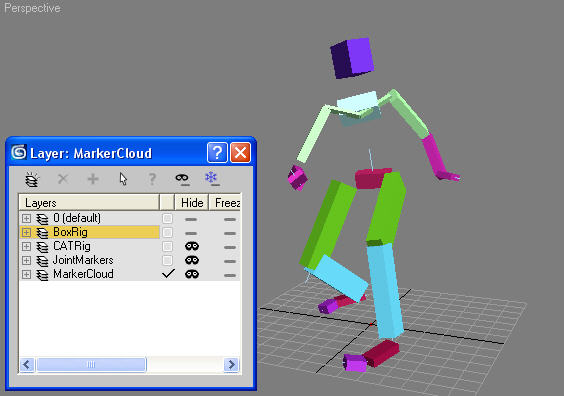
A segunda camada é o BoxRig que define os ângulos da junta. As caixas são restritas às posições da junta e os controladores LookAt definem as rotações. Observe que a posição exata de muitos ossos não é importante. Por exemplo, as juntas de joelho se movem em relação ao osso do quadril, mas quando esses dados são mapeados para o CATRig, o último sistema de cinemática direta limpa efetivamente o movimento e bloqueia as localizações da junta.
CATRig
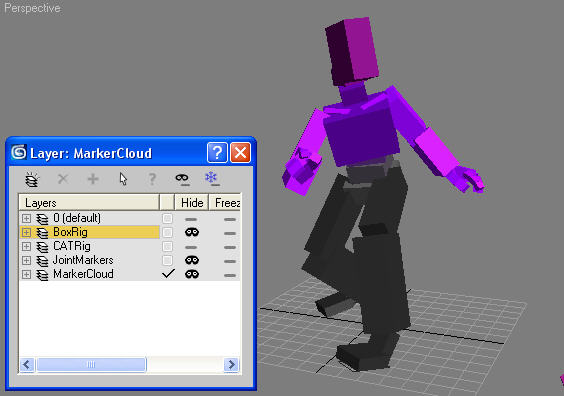
O CATRig foi mapeado para o BoxRig utilizando a ferramenta Capturar animação.