A precedência Filho -> Pai faz com que as junções mais próximas ao ponto onde é aplicada uma força (o efetor de fim) se movam para mais de junções que estejam longe da força. Como a precedência padrão, a precedência Filho -> Pai produz um resultado natural que serve para muitas soluções de cinemática inversa.
A diferença é que a precedência Filho −> Pai atribui valores únicos para cada objeto da cadeia cinemática (a precedência padrão usa o valor 0 para cada objeto). A precedência Filho -> Pai é mais flexível no caso de querer retornar e mudar manualmente os valores de precedência.
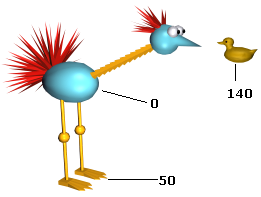
A primeira imagem demonstra os valores para a precedência filho para pai.

A primeira imagem demonstra os valores para a precedência filho para pai.
Atribuindo precedências Filho -> Pai
Clicar em Filho −> Pai define a precedência de junção com base em um filho ter uma maior precedência do que seu pai. Os valores são calculados ao definir a raiz de toda a hierarquia para uma precedência de valor 0 e cada filho para um valor igual a 10 vezes sua profundidade da raiz.
O secundário é quase sempre atribuído->A Prioridade principal para uma cadeia cinemática inteira. A cadeia para a estrutura na figura utiliza o corpo como o objeto raiz e o duck como o efetor de fim.
Cada objeto recebe um valor igual a sua profundidade desde a raiz da hierarquia vezes 10. Observe que o valor de precedência é calculado baseado na raiz da hierarquia, não importando se ou não a raiz for selecionada ou não como parte da cadeia cinemática.
É possível que queira atribuir a precedência Filho -> Pai para um único objeto na cadeia cinemática. Por exemplo, se tiver alterado manualmente os valores de precedência, pode desejar definir um objeto para o seu valor Filho -> Pai original. O valor atribuído para o objeto é igual à sua profundidade desde a raiz da hierarquia vezes 10.