激励器单元是一条可以位于任意方向上的直线。激励器单元的一个节点视为主节点,相对的节点视为从节点。在分析过程中,从节点能够相对于主节点平动或转动。它遵循载荷曲线,可模拟液压缸或发动机。主节点必须约束或附着到结构上,从节点附着到结构上。
有三种类型的激励器单元可用于分析。在“单元定义”对话框的“传动类型”下拉框中,可以选择激励器单元的类型。
- 如果仅规定两个节点之间的距离,请选择“距离(位移)”选项。应用于激励器单元的结构转动可以不受约束,也可以强制相等,具体取决于选择的选项(请参见下文的“激励器单元约束”)。
- 如果不会控制节点之间的距离,但从节点将相对于主节点进行规定的轴向转动,请选择“相对轴向转动”选项。轴向转动是指围绕两个激励器单元节点之间的直线转动。请注意,从节点将相对于主节点自由平动,以此作为对外施载荷的反应。激励器可以伸长或缩短。
- 如果规定两个节点之间的距离,且从节点将相对于主节点进行规定的轴向转动,请选择“距离和轴向转动”选项。
控制相对位移和转动
在“单元定义”对话框的“位移”选项卡中,可以指定从节点相对于主节点进行的位移。(如果在“传动类型”下拉框中选择“相对轴向转动”选项,则此选项卡中的控件将不可用。)在“指定的长度(载荷)曲线编号”下拉框中,指定将用于控制相对位移的载荷曲线。若要载荷曲线再乘以一个常数因子,请在“载荷曲线乘子”字段中指定该因子。
- 由于激励器单元的长度瞬变将导致模型失稳,因此当 T 等于载荷大小乘以载荷曲线乘子时,激励器单元将不使用典型的载荷(或本例中的长度)定律。相反,激励器单元在时间步中的长度变化等于载荷曲线乘子中的变化。具体地说,即
- L(t) = L(t=0) + (LCM(t) - LCM(t=0)) x 乘子
- 其中,L(t) 是激励器在时间为 t 时的长度,LCM(t) 是时间为 t 时的载荷曲线乘子,乘子则是在“载荷曲线乘子”字段中指定的常数因子。单元可以长于或短于初始长度 L(t=0),具体取决于载荷曲线。
在“单元定义”对话框的“转动”选项卡中,可以指定从节点相对于主节点进行的轴向转动。(如果在“转动(载荷)曲线编号的类型”下拉框中选择“距离(位移)”选项,则此选项卡中的控件将不可用。)在“指定的转动(载荷)曲线编号”下拉框中,指定将用于控制相对位移的载荷曲线。若要载荷曲线再乘以一个常数因子,请在“载荷曲线乘子”字段中指定该因子。与使用载荷曲线控制长度类似,激励器在时间步中的转动变化(以转数衡量)同样等于载荷曲线乘子中的变化。具体地说,即
ϑ(t) = ϑ(t=0) + (LCM(t) - LCM(t=0)) x 乘子
其中,ϑ(t) 是激励器在时间为 t 时的转动角度(以转数衡量),LCM(t) 是时间为 t 时的载荷曲线乘子,乘子则是在“载荷曲线乘子”字段中指定的常数因子。
激励器单元约束
有三个参数可用于控制激励器单元的转动行为。要使从节点的轴向转动与主节点的轴向转动重合,请在“单元定义”对话框的“约束”选项卡中,激活“单元两端的耦合轴向转动”复选框。仅当激励器的距离(位移)受到控制时,此复选框才可用。如果激励器的转动角度受到控制,则此复选框将不可用。通过激活“单元定义”对话框“约束”选项卡中的“耦合单元两端的平面转动”复选框,可以强制垂直于激励器单元的两个转动,或者强制从节点相对于主节点进行的平面转动。请参见图 1。
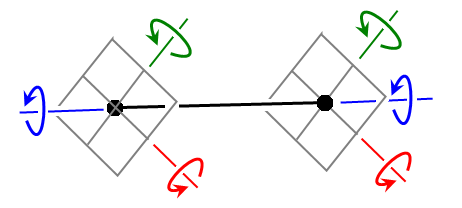
图 1:激励器末端的耦合转动
默认情况下,激励器单元(黑色)与结构(灰色)之间的连接行为类似于球形接头;两端的结构均可相互独立地在所有三个方向上转动。如果激活“单元两端的耦合轴向转动”选项,则扭矩将通过激励器传递,使附着到两端的结构的轴向转动角度(蓝色箭头)相同。如果激活“耦合单元两端的平面转动”选项,则激励器两端将施加力矩,使附着到激励器的结构的垂直转动角度(绿色箭头)相同。
通常,仅当附着到激励器的结构的单元具有旋转自由度时(例如,梁和壳单元),才可控制该结构的转动。
高级激励器单元参数
您可以控制激励器几何体的更新频率。该几何体始终在每个收敛时间步之后更新。若要在时间步中的每次迭代之后更新几何体,请在“单元定义”对话框“高级”选项卡上的“几何更新基于”下拉框中选择“上一次迭代”选项。
使用激励器单元的基本步骤
- 确保已定义单位制。
- 确保模型使用非线性分析类型。
- 对于要成为激励器单元的部件,请在其“单元类型”标题上单击鼠标右键。
- 选择“激励器”命令。
- 在“单元定义”标题上单击鼠标右键。
- 选择“编辑单元定义”命令。
- 在“传动类型”下拉框中,选择此部件所属的激励器单元类型。
- 根据激励器单元的类型,在相应选项卡中指定适当信息。
- 按“确定”按钮。