非线性分析中的接触包括各种不同类型的接触,例如:
- 碰撞面
- 部件之间的面面接触
- 接触、常规接触、耦合单元类型
- 桁架-曲线材料模型,用于模拟间隙单元
在非线性静态分析中使用时,请记住,模型的所有部件均必须在所有迭代的所有时间步静态稳定,而不依赖于接触。如果不采纳此建议,则分析可能收敛速度较慢或无法运行。
稳定模型
如果部件能够在与其他部件相互作用之前自由移动,则必须使用弱弹簧约束这些自由部件。其目的在于稳定所有部件,但允许它们在这个过程中移动一定距离。如果某些迭代中不考虑接触,则弱弹簧将约束部件,以便处理器能够计算解,但处理器随后检测到发生了某些接触,然后继续进行下一次迭代并包括接触。由于现实生活中并不存在弱弹簧,因此需要设置刚度,最大程度地减少对结果的影响。通过弹簧从模型传递到底面的载荷应当只是外施载荷的一小部分。请参见图 1。
在某些情况下,可以在几个方向上使用边界条件,防止部件移动。例如,连接叉内部的销能够在轴向上使用边界条件以实现稳定。在其他方向上使用弱弹簧(例如,发生接触的方向),以便在允许销移动并接触的同时实现稳定。
添加弱弹簧单元的详细步骤如下:(子装配件在此处定义为粘合在一起的任意部件数。)
- 对于部分或完全受到接触约束的子装配件,在新的部件编号上绘制直线(“几何体: 添加: 直线”)。确保未选择“作为构造体使用”选项,并在线对话框上激活“使用相对”选项。
- 添加一组线(三条),这些线分别对应于 X、Y 和 Z 方向并连接到子装配件上的节点。若要在所有方向实现稳定,请将一组线添加到三个不在一条直线上的任意节点。(如果子装配件在某个方向上受边界条件约束,则可使用三个以下节点。弹簧单元的目标是使部件在所有六个方向上静态稳定:三个平动和三个转动。)如果弹簧单元不妨碍运动,则线长对分析的影响可以忽略不计。
- 选择弹簧自由端上的每个节点(“选择: 选择: 顶点”,单击鼠标右键,然后选择“添加: 节点边界条件”。将边界条件设置为“固定”。
- 在树视图中的“单元类型”条目上单击鼠标右键,然后选择“弹簧”。
- 在树视图中的“单元定义”条目上单击鼠标右键,然后选择“编辑单元定义”。在“弹簧刚度”字段中输入一个值。发现弹簧连接到地面后,部分外施载荷会传递到地面。若要最小化从模型中删除的载荷量,请计算适当的刚度,如下所示:估计节点处将发生的变形,并假定一部分外施载荷(如 .1%)将通过弹簧传递。刚度可以计算为载荷/变形。例如,如果外施载荷为 1000 lbs,且您希望弹簧单元承载 1 lb 载荷(在部件接触之前),同时如果模型在弹簧位置的估计变形为 0.05 英寸,则可接受的刚度为 F/d = (1 lb)/(0.05 英寸)= 20 lb/in。
- 根据需要,针对模型中的其他子装配件重复上述步骤。
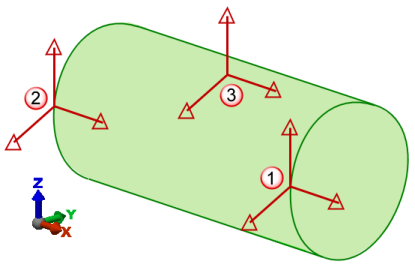
图 1:销上的三套弹簧实现稳定
设想一下销与连接叉保持接触。(为清楚起见,不显示连接叉。)1 和 2 处的弹簧可防止销在 X、Y 和 Z 上平动或绕 Y 和 Z 转动,但不会阻止销绕 X 轴转动(从技术上讲,即连接 1 和 2 处节点的线)。3 处的弹簧可防止销绕此转动。(从技术角度来说,点 3 处 X 和 Y 方向上的弹簧并非必不可少,但为了方便起见,可以将其包括在内。)
分析之后
如果弹簧单元是用于稳定模型的任何部件,请使用“结果”环境检查弹簧单元中的轴向力(“结果: 单元力和力矩: 轴向力”)。与模型中的外施载荷相比,轴向力的大小应当可以忽略不计。